
Page 78 - Linkline Yearbook 2017
P. 78
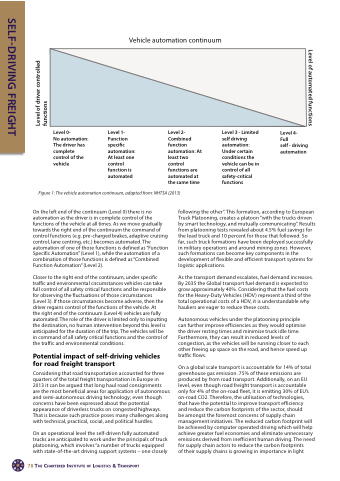
Figure 1: The vehicle automation continuum, adapted from: NHTSA (2013)
On the left end of the continuum (Level 0) there is no automation as the driver is in complete control of the functions of the vehicle at all times. As we move gradually towards the right end of the continuum the command of control functions (e.g. pre-charged brakes, adaptive cruising control, lane centring, etc.) becomes automated. The automation of one of those functions is defined as “Function Specific Automation” (Level 1), while the automation of a combination of those functions is defined as “Combined Function Automation” (Level 2).
Closer to the right end of the continuum, under specific traffic and environmental circumstances vehicles can take full control of all safety critical functions and be responsible for observing the fluctuations of those circumstances
(Level 3). If those circumstances become adverse, then the driver regains control of the functions of the vehicle. At
the right end of the continuum (Level 4) vehicles are fully automated. The role of the driver is limited only to inputting the destination, no human intervention beyond this level is anticipated for the duration of the trip. The vehicles will be in command of all safety critical functions and the control of the traffic and environmental conditions.
Potential impact of self-driving vehicles for road freight transport
Considering that road transportation accounted for three quarters of the total freight transportation in Europe in 2013 it can be argued that long haul road consignments are the most beneficial areas for application of autonomous and semi-autonomous driving technology; even though concerns have been expressed about the potential appearance of driverless trucks on congested highways. That is because such practice poses many challenges along with technical, practical, social, and political hurdles.
On an operational level the self-driven fully automated trucks are anticipated to work under the principals of truck platooning, which involves “a number of trucks equipped with state-of-the-art driving support systems – one closely
followingtheother”.Thisformation,accordingtoEuropean Truck Platooning, creates a platoon “with the trucks driven by smart technology, and mutually communicating”. Results from platooning tests revealed about 4.5% fuel savings for the lead truck and 10 percent for those that followed. So far, such truck formations have been deployed successfully in military operations and around mining zones. However, such formations can become key components in the development of flexible and efficient transport systems for logistic applications.
As the transport demand escalates, fuel demand increases. By 2035 the Global transport fuel demand is expected to grow approximately 40%. Considering that the fuel costs for the Heavy-Duty Vehicles (HDV) represent a third of the total operational costs of a HDV, it is understandable why hauliers are eager to reduce these costs.
Autonomous vehicles under the platooning principle can further improve efficiencies as they would optimise the driver resting times and minimise truck idle time. Furthermore, they can result in reduced levels of congestion, as the vehicles will be running closer to each other freeing up space on the road, and hence speed up traffic flows.
On a global scale transport is accountable for 14% of total greenhouse gas emission. 75% of these emissions are produced by from road transport. Additionally, on an EU level, even though road freight transport is accountable only for 4% of the on-road fleet, it is emitting 30% of EU’s on-road CO2. Therefore, the utilisation of technologies, that have the potential to improve transport efficiency and reduce the carbon footprints of the sector, should
be amongst the foremost concerns of supply chain management initiatives. The reduced carbon footprint will be achieved by computer operated driving which will help achieve greater fuel economies and eliminate unnecessary emissions derived from inefficient human driving. The need for supply chain actors to reduce the carbon footprints
of their supply chains is growing in importance in light
Vehicle automation continuum
Level 0-
No automation: The driver has complete control of the vehicle
Level 1- Function speci c automation: At least one control function is automated
Level 2- Combined function automation: At least two control functions are automated at the same time
Level 3 - Limited self driving automation: Under certain conditions the vehicle can be in control of all safety-critical functions
Level 4-
Full
self - driving automation
78 The CharTered InsTITuTe of LogIsTICs & TransporT
Level of driver controlled functions
Level of automated functions
SELF-DRIVING FREIGHT
