
Page 233 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 233
222 CHAPTER 9 LARS and TMS
absence of a TMS between the launch platform and the vehicle for managing the transition from the heavy metal umbilical and the soft (and neutrally buoyant) flying tether.
For the smaller observation-class vehicles, the launch and recovery is, in most cases, a much simpler approach. In many cases, the vehicle can be hand launched, use a crane, or be launched in a protective cage with or without a TMS.
The primary objective of the LARS is to move the vehicle or vehicleTMS combination from the deck through the splash zone and to the working depth safely in a controlled fashion. As the vehicles grow larger, so does the LARS. The equipment can range from a simple overboarding A-frame to a telescoping and/or cursive mechanism with complex motion compensation. Many of the larger LARS are integrated into the ship or platform, which is especially beneficial where heavy sea states are expected.
To provide a complete perspective, the following sections will address launch techniques and concerns from the smallest vehicles up to the largest work-class systems.
9.1 Free-flying vehicle deployment techniques
Deployment methods vary for the free-flying vehicle, but there are a few common methods that have proven successful. The deployment methods can be divided into two main categories: directly deployed and cage deployed. These are described below.
9.1.1 Directly deployed/free-flying
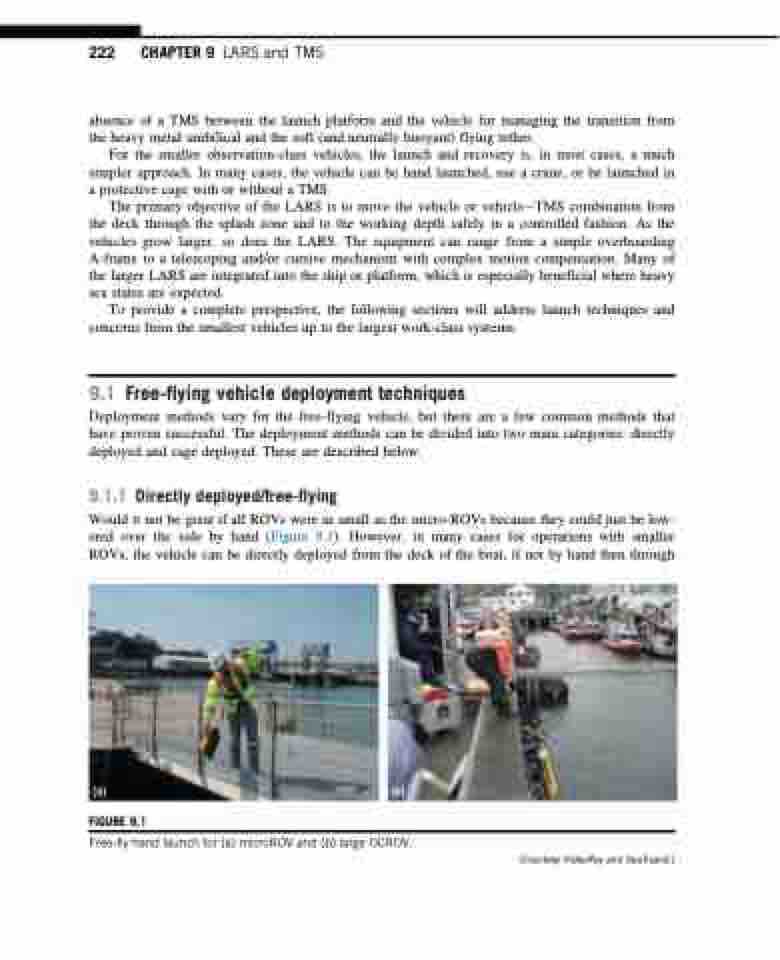
Would it not be great if all ROVs were as small as the micro-ROVs because they could just be low- ered over the side by hand (Figure 9.1). However, in many cases for operations with smaller ROVs, the vehicle can be directly deployed from the deck of the boat, if not by hand then through
(a) (b)
FIGURE 9.1
Free-fly hand launch for (a) microROV and (b) large OCROV.
(Courtesy VideoRay and SeaTrepid.)
