
Page 527 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 527
524 CHAPTER 19 Manipulators
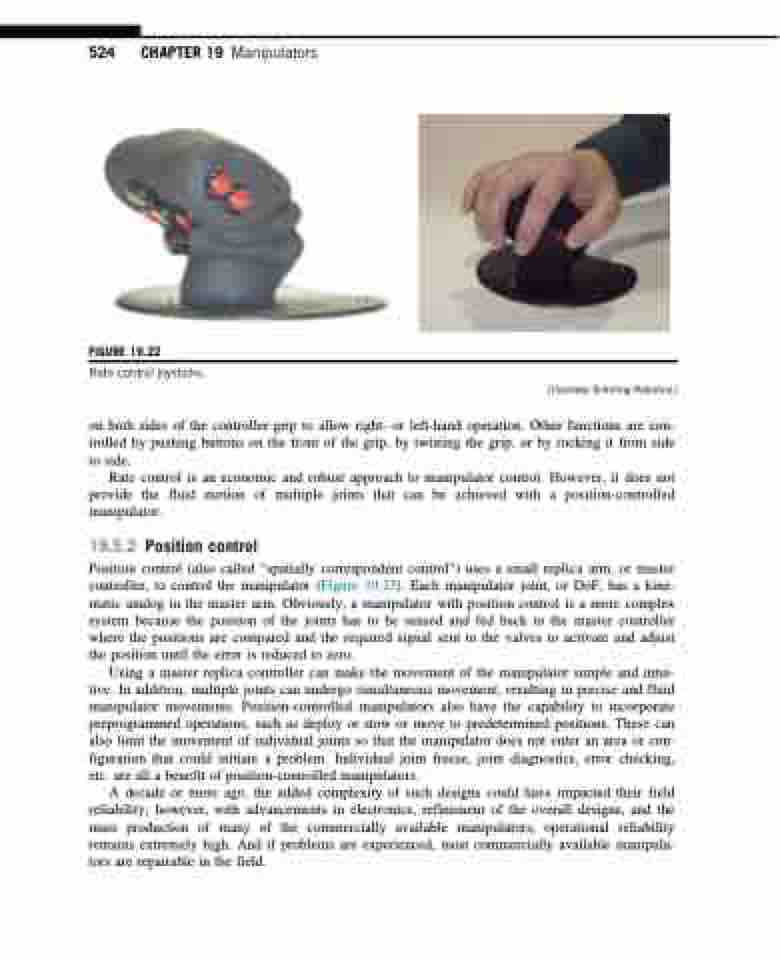
FIGURE 19.22
Rate control joysticks.
on both sides of the controller grip to allow right- or left-hand operation. Other functions are con- trolled by pushing buttons on the front of the grip, by twisting the grip, or by rocking it from side to side.
Rate control is an economic and robust approach to manipulator control. However, it does not provide the fluid motion of multiple joints that can be achieved with a position-controlled manipulator.
19.5.2 Position control
Position control (also called “spatially correspondent control”) uses a small replica arm, or master controller, to control the manipulator (Figure 19.23). Each manipulator joint, or DoF, has a kine- matic analog in the master arm. Obviously, a manipulator with position control is a more complex system because the position of the joints has to be sensed and fed back to the master controller where the positions are compared and the required signal sent to the valves to activate and adjust the position until the error is reduced to zero.
Using a master replica controller can make the movement of the manipulator simple and intui- tive. In addition, multiple joints can undergo simultaneous movement, resulting in precise and fluid manipulator movements. Position-controlled manipulators also have the capability to incorporate preprogrammed operations, such as deploy or stow or move to predetermined positions. These can also limit the movement of individual joints so that the manipulator does not enter an area or con- figuration that could initiate a problem. Individual joint freeze, joint diagnostics, error checking, etc. are all a benefit of position-controlled manipulators.
A decade or more ago, the added complexity of such designs could have impacted their field reliability; however, with advancements in electronics, refinement of the overall designs, and the mass production of many of the commercially available manipulators, operational reliability remains extremely high. And if problems are experienced, most commercially available manipula- tors are repairable in the field.
(Courtesy Schilling Robotics.)
