
Page 599 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 599
598 CHAPTER 21 Practical Applications
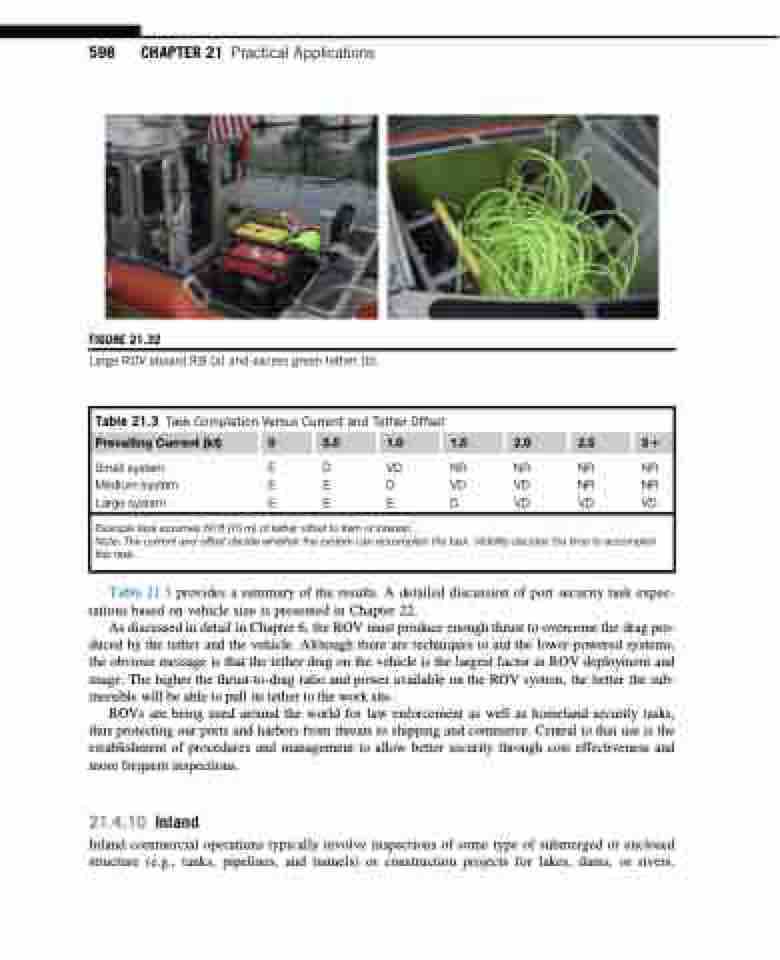
FIGURE 21.32
Large ROV aboard RB (a) and excess green tether (b).
Table 21.3 Task Completion Versus Current and Tether Offset
Prevailing Current (kt) 0 0.5 1.0 1.5
2.0
2.5 31
Small system E D VD NR NR NR NR Medium system E E D VD VD NR NR Largesystem EEEDVDVDVD
Example task assumes 50 ft (15 m) of tether offset to item of interest.
Note: The current and offset decide whether the system can accomplish the task. Visibility decides the time to accomplish this task.
Table 21.3 provides a summary of the results. A detailed discussion of port security task expec- tations based on vehicle size is presented in Chapter 22.
As discussed in detail in Chapter 6, the ROV must produce enough thrust to overcome the drag pro- duced by the tether and the vehicle. Although there are techniques to aid the lower-powered systems, the obvious message is that the tether drag on the vehicle is the largest factor in ROV deployment and usage. The higher the thrust-to-drag ratio and power available on the ROV system, the better the sub- mersible will be able to pull its tether to the work site.
ROVs are being used around the world for law enforcement as well as homeland security tasks, thus protecting our ports and harbors from threats to shipping and commerce. Central to that use is the establishment of procedures and management to allow better security through cost effectiveness and more frequent inspections.
21.4.10 Inland
Inland commercial operations typically involve inspections of some type of submerged or enclosed structure (e.g., tanks, pipelines, and tunnels) or construction projects for lakes, dams, or rivers.
