
Page 7 - E-Book-3Neat
P. 7
3
1) ความเป็นมาของการควบคุม
ก. ระบบควบคุมในยุคโบราณ เป็นการใช้ระบบควบคุมแบบวงปิด นั้นมีมาแต่โบราณกาล
ตัวอย่างเช่น นาฬิกาน้ำของกรีกโบราณ ซึ่งมีการใช้ลูกลอยในการควบคุมระดับน้ำในถัง อุปกรณ์ที่ถือว่าเป็น
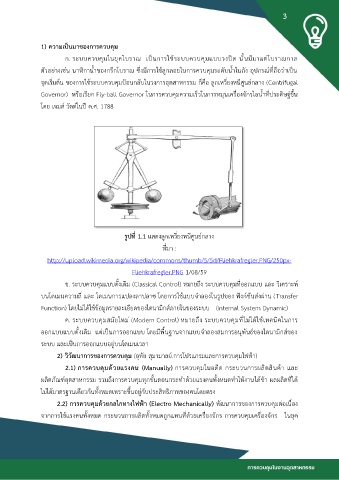
จุดเริ่มต้น ของการใช้ระบบควบคุมป้อนกลับในวงการอุตสาหกรรม ก็คือ ลูกเหวี่ยงหนีศูนย์กลาง (Centrifugal
Governor) หรือเรียก Fly-ball Governor ในการควบคุมความเร็วในการหมุนเครื่องจักรไอน้ำที่ประดิษฐ์ขึ้น
โดย เจมส์ วัตต์ในปี ค.ศ. 1788
รูปที่ 1.1 แสดงลูกเหวี่ยงหนีศูนย์กลาง
ที่มา :
http://upload.wikimedia.org/wikipedia/commons/thumb/5/5d/Fliehkrafregler.PNG/250px-
Fliehkrafregler.PNG 1/08/59
ข. ระบบควบคุมแบบดั้งเดิม (Classical Control) หมายถึง ระบบควบคุมที่ออกแบบ และ วิเคราะห์
บนโดเมนความถี่ และ โดเมนการแปลงลาปลาซ โดยการใช้แบบจำลองในรูปของ ฟังก์ชันส่งผ่าน (Transfer
Function) โดยไม่ได้ใช้ข้อมูลรายละเอียดของไดนามิกส์ภายในของระบบ (Internal System Dynamic)
ค. ระบบควบคุมสมัยใหม่ (Modern Control) หมายถึง ระบบควบคุมที่ไม่ได้ใช้เทคนิคในการ
ออกแบบแบบดั้งเดิม แต่เป็นการออกแบบ โดยมีพื้นฐานจากแบบจำลองสมการอนุพันธ์ของไดนามิกส์ของ
ระบบ และเป็นการออกแบบอยู่บนโดเมนเวลา
2) วิวัฒนาการของการควบคุม (อุทัย สุมามาลย์.การโปรแกรมและการควบคุมไฟฟ้า)
2.1) การควบคุมด้วยแรงคน (Manually) การควบคุมในอดีต กระบวนการผลิตสินค้า และ
ผลิตภัณฑ์อุตสาหกรรม รวมถึงการควบคุมทุกขั้นตอนกระทำด้วยแรงคนทั้งหมดทำให้งานได้ช้า ผลผลิตที่ได้
ไม่ได้มาตรฐานเดียวกันทั้งหมดเพราะขึ้นอยู่กับประสิทธิภาพของคนโดยตรง
2.2) การควบคุมด้วยกลไกทางไฟฟ้า (Electro Mechanically) พัฒนาการของการควบคุมต่อเนื่อง
จากการใช้แรงคนทั้งหมด กระบวนการผลิตทั้งหมดถูกแทนที่ด้วยเครื่องจักร การควบคุมเครื่องจักร ในยุค