
Page 24 - 山东高校“青年创新创业联盟”科创资源供给库
P. 24
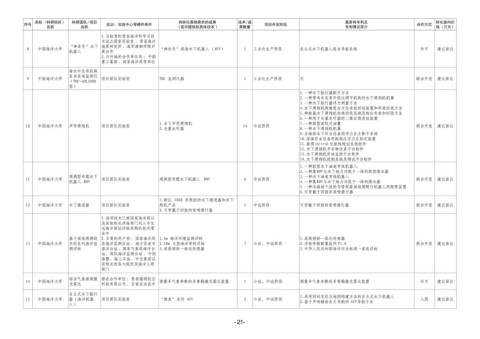
高校(科研院所) 科研团队/项目 有转化落地需求的成果 技术/成 是否有专利及 转化意向价
序号 实训、实验中心等硬件条件 项目开发阶段 合作方式
名称 名称 (或可提供的具体技术 ) 果数量 专利情况简介 格(万元)
1.与驻青的青岛海洋科学与技
术试点国家实验室 、青岛海洋
“神龙号”水下 地质研究所 、海军潜艇学院开
8 中国海洋大学 “神龙号”深海水下机器人 (AUV) 1 工业化生产阶段 自主式水下机器人组合导航系统 许可 建议面议
机器人 展合作
2.与外地的合作单位有 :中船
重工集团,国家海洋局等单位
海水中总有机碳
自动在线监测仪
9 中国海洋大学 项目团队实验室 TOC 监测仪器 1 工业化生产阶段 无 联合开发 建议面议
(TOC-AOL2008
型)
1.一种水下航行器配平方法
2.一种带有非定常升阻比调节机构的水下滑翔机机翼
3.一种水下航行器浮力测量方法
4.水下滑翔机两维度全方位布放回收装置和布放回收方法
5.种船基水下滑翔机布放回收系统及相应布放和回收方法
6.一种用于矢量水听器的二维自稳悬挂装置
1.水下声学滑翔机 7.一种新型波纹式油囊
10 中国海洋大学 声学滑翔机 项目团队实验室 14 中试阶段 联合开发 建议面议
2.矢量水听器 8.一种水下滑翔机机翼
9.全海深水下作业设备用浮力自主配平系统
10.深海作业设备用耐高压浮力自标定装置
11.截图(Alt+A)化航线规划系统软件
12.水下滑翔机半实物仿真平台软件
13.水下滑翔机岸站监控平台软件
14.水下滑翔机控制系统及测试平台软件
1.一种新型水下涵道穿线机器人
2.一种集ROV与水下助力功能于一体的新型潜水器
观测型有缆水下 3.一种水下涵道穿线机器人
11 中国海洋大学 项目团队实验室 观测型有缆水下机器人 ROV 6 中试阶段 联合开发 建议面议
机器人 ROV 4.一种集ROV与水下助力功能于一体的潜水器
5.一种无磁场干扰的导管架腐蚀检测爬行机器人用爬管装置
6.可穿戴于四肢的泵喷潜行器
1.耐压 1000 米级别的水下推进器和水下
12 中国海洋大学 水下推进器 项目团队实验室 舵机产品 1 中试阶段 可穿戴于四肢的泵喷潜行器 联合开发 建议面议
2.可穿戴于四肢的泵喷潜行器
1.该项技术已被国家海洋局以
及其他相关涉海部门列入中长
远海洋规划浮标采购的技术要
求中
基于波浪观测技 2.主要的用户有 :国家海洋局 1.3m 海洋环境监测浮标 1.波高倾斜一体化传感器
13 中国海洋大学 术的系列海洋监 各海洋监测台站 、地方各省市 2.10m 大型海洋资料浮标 3 小试、中试阶段 2.浮标参数配置软件 V1.0 联合开发 建议面议
测浮标 海洋台站、国家气象局海洋台 3.波高倾斜一体化传感器 3.中华人民共和国海洋行业标准 -波浪浮标
站、部队海洋监测台站 、中国
海警、海上石油、中交集团以
及相关的各大院所及海洋工程
部门
综合气象探测激 潜在合作单位 :青岛镭测创芯
14 中国海洋大学 测量多气象参数的多普勒激光雷达装置 1 小试、中试阶段 测量多气象参数的多普勒激光雷达装置 许可 建议面议
光雷达 科技有限公司 ,目前在洽谈中
自主式水下航行 1.采用同时定位与地图构建方法的自主式水下机器人
15 中国海洋大学 器(海洋机器 项目团队实验室 “旗鱼”系列 AUV 2 小试、中试阶段 2.基于声呐辅助自主导航的 AUV导航方法 入股 建议面议
人)
-21-