
Page 38 - TEMCA MAG. ฉบับที่ 3 ปีที่ 28
P. 38
สมองใสไฮเทค
ทิศทางของมอเตอร์นั้น สามารถที่จะใช้รีเลย์ต่อ วงจร สวติ ซเ์ พอ่ื กลบั ทศิ ทางของขว้ั ไฟกระแสตรง หรืออาจใช้อุปกรณ์สารกึ่งตัวนําาที่เป็นวงจรขับ กําาลัง เช่น ทรานซิสเตอร์ มอสเฟต แล้วแต่วิธีท่ี เราจะเลือกใช้งาน
จากรูปที่ 7 เป็นการใช้รีเลย์ควบคุมการ เปล่ียนทิศทางการหมุนของมอเตอร์ โดยการ ควบคุมการปิด-เปิดท่ีรีเลย์ 2 ตัว ซึ่งจะทําาหน้า ท่ีกลับทิศทางของขั้วไฟท่ีป้อนให้กับมอเตอร์ โดยการสลับการทําางานของรีเลย์ เช่น ให้ รีเลย์ตัวที่ 1 ทําางาน (ON) และรีเลย์ตัวที่ 2 หยุดทําางาน (OFF) จะทําาให้มอเตอร์หมุนไป ทางซ้าย และในทําานองเดียวกันถ้าหากรีเลย์ ตัวที่ 1 หยุดทําางาน (OFF) และรีเลย์ตัวท่ี 2 ทาํา งาน (ON) กจ็ ะทาํา ใหม้ อเตอรห์ มนุ ไปทางขวา
เพียงพอในการป้อนให้กับขดลวดของรีเลย์ ส่วนไดโอดนําามาต่อไว้สําาหรับป้องกันแรงดัน ย้อนกลับท่ีเกิดจากการเหน่ียวนําาของสนามแม่ เหล็กในขณะเกิดการยุบตัว ซึ่งอาจจะทําาให้ ทรานซิสเตอร์เสียหายได้
ควบคุมในวิธีดังกล่าวถึงแม้ว่าจะควบคุมความ เร็วมอเตอร์ให้คงท่ีได้ แต่ท่ีความเร็วต่ําาจะส่งผล ให้แรงบิดตํา่าไปด้วย ดังนั้นเราจึงเลือกใช้วิธีการ ควบคมุ โดยการจา่ ยกระแสไฟใหก้ บั มอเตอรเ์ ปน็ ช่วงๆ โดยอาศัยกระแสไฟที่ป้อนให้กับมอเตอร์
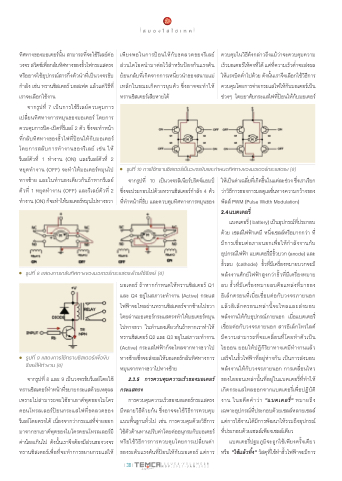
รปู ท่ี 10 การใชท้ รานซสิ เตอรเ์ ปน็ วงจรขบั และกาํา หนดทศิ ทางของมอเตอรก์ ระแสตรง [6]
จากรูปที่ 10 เป็นวงจรลิเนียร์บริดจ์แอมป์ ซึ่งจะประกอบไปด้วยทรานซิสเตอร์กําาลัง 4 ตัว ที่ทําาหน้าที่ขับ และควบคุมทิศทางการหมุนของ
ใหเ้ ปน็ คา่ เฉลย่ี ทเ่ี กดิ ขน้ึ ในแตล่ ะชว่ ง ซง่ึ เราเรยี ก ว่าวิธีการของการมอดูเลชั่นทางความกว้างของ พัลส์ PWM (Pulse Width Modulation)
2.4 แบตเตอร่ี
แบตเตอรี่ ( battery) เป็นอุปกรณ์ที่ประกอบ ด้วย เซลล์ไฟฟ้าเคมี หนึ่งเซลล์หรือมากกว่า ท่ี มีการเชื่อมต่อภายนอกเพื่อให้กําาลังงานกับ อุปกรณ์ไฟฟ้า แบตเตอรี่มีขั้วบวก (anode) และ ขั้วลบ (cathode) ขั้วที่มีเครื่องหมายบวกจะมี พลังงานศักย์ไฟฟ้าสูงกว่าข้ัวที่มีเครื่องหมาย ลบ ขั้วท่ีมีเคร่ืองหมายลบคือแหล่งท่ีมาของ อิเล็กตรอนที่เม่ือเช่ือมต่อกับวงจรภายนอก แล้วอิเล็กตรอนเหล่าน้ีจะไหลและส่งมอบ พลังงานให้กับอุปกรณ์ภายนอก เมื่อแบตเตอรี่ เชื่อมต่อกับวงจรภายนอก สารอิเล็กโทรไลต์ มีความสามารถที่จะเคล่ือนที่โดยทําาตัวเป็น ไอออน ยอมให้ปฏิกิริยาทางเคมีทําางานแล้ว เสร็จในขั้วไฟฟ้าที่อยู่ห่างกัน เป็นการส่งมอบ พลังงานให้กับวงจรภายนอก การเคลื่อนไหว ของไอออนเหล่านั้นท่ีอยู่ในแบตเตอร่ีที่ทําาให้ เกิดกระแสไหลออกจากแบตเตอร่ีเพ่ือปฏิบัติ งาน ในอดีตคําาว่า "แบตเตอรี่" หมายถึง เฉพาะอุปกรณ์ที่ประกอบด้วยเซลล์หลายเซลล์ แต่การใช้งานได้มีการพัฒนาให้รวมถึงอุปกรณ์ ท่ีประกอบด้วยเซลล์เพียงเซลล์เดียว
แบตเตอรี่ปฐมภูมิจะถูกใช้เพียงครั้งเดียว หรือ "ใช้แล้วทิ้ง" วัสดุที่ใช้ทําาขั้วไฟฟ้าจะมีการ
รูปที่ 8 แสดงการกลับทิศทางของมอเตอร์กระแสตรงโดยใช้รีเลย์ [6]
รูปที่ 9 แสดงการใช้ทรานซิสเตอร์เพื่อขับ รีเลย์ให้ทําางาน [6]
จากรูปที่ 8 และ 9 เป็นวงจรขับรีเลย์โดยใช้ ทรานซิสเตอร์ทําาหน้าท่ีขยายกระแสด้วยเหตุผล เพราะไม่สามารถจะใช้ขาเอาต์พุตของไมโคร คอนโทรลเลอร์ป้อนกระแสไฟท่ีขดลวดของ รีเลย์โดยตรงได้ เน่ืองจากว่ากระแสที่จ่ายออก มาจากขาเอาต์พุตของไมโครคอนโทรลเลอร์มี ค่าน้อยเกินไป ดังน้ันเราจึงต้องมีส่วนของวงจร ทรานซิสเตอร์เพ่ือที่จะทําาการขยายกระแสให้
มอเตอร์ ถ้าหากกําาหนดให้ทรานซิสเตอร์ Q1 และ Q4 อยู่ในสภาวะทําางาน (Active) กระแส ไฟฟ้าจะไหลผ่านทรานซิสเตอร์จากซ้ายไปขวา โดยผ่านมอเตอร์กระแสตรงทําาให้มอเตอร์หมุน ไปทางขวา ในทําานองเดียวกันถ้าหากเราทําาให้ ทรานซิสเตอร์ Q2 และ Q3 อยูในสภาวะทําางาน (Active) กระแสไฟฟ้าก็จะไหลจากทางขวาไป ทางซ้ายซึ่งจะส่งผลให้มอเตอร์กลับทิศทางการ หมุนจากทางขวาไปทางซ้าย
2.3.5 การควบคุมความเร็วของมอเตอร์ กระแสตรง
การควบคมุ ความเรว็ ของมอเตอรก์ ระแสตรง มีหลายวิธีด้วยกัน ซึ่งอาจจะใช้วิธีการควบคุม แบบพื้นฐานทั่วไป เช่น การควบคุมด้วยวิธีการ ใชต้ วั ตา้ นทานปรบั คา่ โดยตอ่ อนกุ รมกบั มอเตอร์ หรือใช้วิธีการการควบคุมโดยการเปล่ียนค่า ของระดับแรงดันท่ีป้อนให้กับมอเตอร์ แต่การ
ISSUE3•VOLUME28 38 NOV.2021-JAN.2022
