
Page 25 - Microsoft Word - ASEPT-UV User Manual
P. 25
4.2 Configuration des points d’intervention
(1) Cliquez sur « Désinfection par lampe UV » (UV lamp disinfection) sous un point
d’intervention pour déterminer s’il faut désinfecter ce point d’intervention. Si
aucune désinfection n’est définie, la désinfection ne sera pas effectuée une fois
que le robot se sera déplacé jusqu’à ce point, ni la rotation, et tout autre activité.
(2) Cliquez sur « Rotation » (Rotate) sous un point d’intervention pour que la tâche
corresponde à une rotation. Si la rotation est activée, une commande de rotation
sera envoyée automatiquement une fois la navigation vers ce point complétée de
même que la désinfection. Le robot ne s’arrêtera pas de tourner tant que la
désinfection ne sera pas complétée.
(3) Cliquez sur le temps de passage pour un point d’intervention spécifique pour
déterminer la durée du temps de désinfection à ce point d’intervention. Le temps
de passage dépend de l’espace à désinfecter.
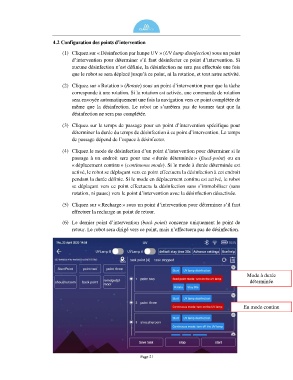
(4) Cliquez le mode de désinfection d’un point d’intervention pour déterminer si le
passage à un endroit sera pour une « durée déterminée » (fixed-point) ou en
« déplacement continu » (continuous mode). Si le mode à durée déterminée est
activé, le robot se déplaçant vers ce point effectuera la désinfection à cet endroit
pendant la durée définie. Si le mode en déplacement continu est activé, le robot
se déplaçant vers ce point effectuera la désinfection sans s’immobiliser (sans
rotation, ni pause) vers le point d’intervention avec la désinfection désactivée.
(5) Cliquez sur « Recharge » sous un point d’intervention pour déterminer s’il faut
effectuer la recharge au point de retour.
(6) Le dernier point d’intervention (back point) concerne uniquement le point de
retour. Le robot sera dirigé vers ce point, mais n’effectuera pas de désinfection.
Mode à durée
déterminée
En mode continu
Page 21