
Page 10 - E-Book Kecerdasan Buatan
P. 10
Gambar 2.2 Teknik Representasi Ruang Keadaan Mengunakan Pohon
2.2 Metode Pencarian pada Ruang Keadaan
Ada beberapa metode pencarian atau search yang bisa digunakan untuk menyelesaikan
permasalahan pada ruang keadaan yaitu Blind Search (Pencarian Buta) dan Heuristik Search
(Pencarian Terbimbing). Perbedaan utama pencarian buta dan heuristic adalah pada pencarian
buta tidak ada informasi awal yang digunakan dalam proses pencarian, sedangkan pencarian
heuristic terdapat informasi awal yang digunakan dalam proses pencarian. Masing-masing
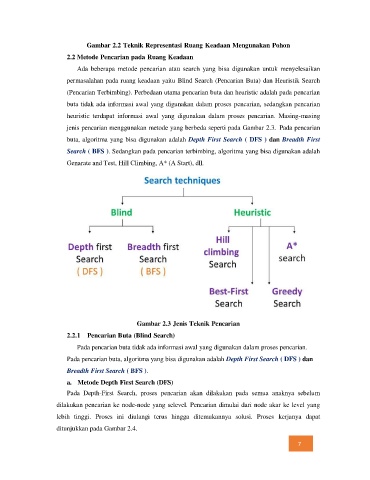
jenis pencarian menggunakan metode yang berbeda seperti pada Gambar 2.3. Pada pencarian
buta, algoritma yang bisa digunakan adalah Depth First Search ( DFS ) dan Breadth First
Search ( BFS ). Sedangkan pada pencarian terbimbing, algoritma yang bisa digunakan adalah
Genarate and Test, Hill Climbing, A* (A Start), dll.
Gambar 2.3 Jenis Teknik Pencarian
2.2.1 Pencarian Buta (Blind Search)
Pada pencarian buta tidak ada informasi awal yang digunakan dalam proses pencarian.
Pada pencarian buta, algoritma yang bisa digunakan adalah Depth First Search ( DFS ) dan
Breadth First Search ( BFS ).
a. Metode Depth First Search (DFS)
Pada Depth-First Search, proses pencarian akan dilakukan pada semua anaknya sebelum
dilakukan pencarian ke node-node yang selevel. Pencarian dimulai dari node akar ke level yang
lebih tinggi. Proses ini diulangi terus hingga ditemukannya solusi. Proses kerjanya dapat
ditunjukkan pada Gambar 2.4.
7