
Page 85 - การพัฒนาการหนังสืออิเล็กทรอนิกส์เรื่องภาษาซี
P. 85
80 81
ตัวอย่างเขียนโค้ดควบคุมหุ่นยนต์ด้วยภาษาc โดยการติดตั้งเซนเซอร์สำาหรับตรวจจับกระป๋องต้องเจาะแขนจับให้ใส่เซนเซอร์เข้าไปด้วย
ระหว่างเดินเข้าหากระป๋องจะได้ตรวจสอบกระป๋องเจอ และยังสามารถเขียนโปรแกรมให้
แยกแยะสีของกระป๋อง (บางสี) ได้ด้วย ดังรูป
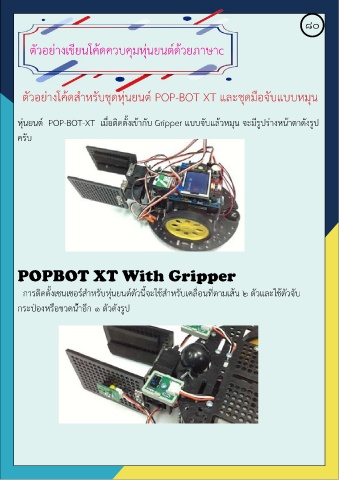
ตัวอย่างโค้ดสำาหรับชุดหุ่นยนต์ POP-BOT XT และชุดมือจับแบบหมุน
หุ่นยนต์ POP-BOT-XT เมื่อติดตั้งเข้ากับ Gripper แบบจับแล้วหมุน จะมีรูปร่างหน้าตาดังรูป
ครับ
การเชื่อมต่อสายเซนเซอร์
เซนเซอร์ด้านซ้ายเข้ากับช่อง A0 เซนเซอร์ด้านขวาเข้ากับช่อง A1 เซนเซอร์จับกระป๋อง
ต่อเข้ากับช่อง A2 โดยเซนเซอร์ทั้งหมดใช้แผงวงจรตรวจจับการสะท้อนแสงอินฟราเรดรุ่น
ZX-03 ทางด้านแขนจับจะต้องควบคุมด้วยเซอร์โวมอเตอร์ถึง 2 ตัว เพื่อจะหนีบกระป๋อง
สามารถเขียนเป็นฟังก์ชันง่าย ๆ สำาหรับหนีบและจับกระป๋องดังนี้
POPBOT XT With Gripper
การติดตั้งเซนเซอร์สำาหรับหุ่นยนต์ตัวนี้จะใช้สำาหรับเคลื่อนที่ตามเส้น 2 ตัวและใช้ตัวจับ ฟังก์ชั่น servo_open() จะใช้สำาหรับเปิดแขนจับออก
กระป๋องหรือขวดน้ำาอีก 1 ตัวดังรูป void servo_open(){
servo(2,80);
sleep(400);
servo(1,140);
sleep(400);
servo(1,-1);
servo(2,-1);
}