
Page 14 - PROGRAMACIÓN BÁSICA FUNCIÓN BLOCKLY
P. 14
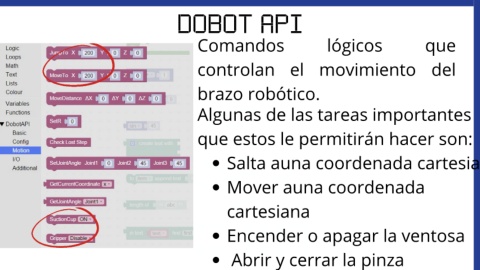
DOBOT API
Comandos lógicos que
controlan el movimiento del
brazo robótico.
Algunas de las tareas importantes
que estos le permitirán hacer son:
Salta auna coordenada cartesia
Mover auna coordenada
cartesiana
Encender o apagar la ventosa
Abrir y cerrar la pinza