
Page 421 - Untitled
P. 421
༛
410༛༛༛฿บงานทีไ༛9༛วงจรลืไอนขຌอมูล༛ ༛ วงจรดิจิตอลละลอจิก༛
ตอวงจรตามรูปการทดลองทีไ༛2.2༛ปງอนขຌอมูลทีไขຌาทีไขา༛SR༛ตามตาราง༛ปງอนสัญญาณนาฬิกาดຌวย
มือครัๅงละ༛1༛พัลสຏ༛สังกตละบันทึกผลการลืไอนของขຌอมูลทีไอาตຏพุตลง฿นตารางผลการทดลองทีไ༛9.2.3༛༛
༛
ตารางบันทึกผลการทดลองทีไ༛9.2.3༛
༛
อินพุต༛ อาตຏพุต༛
หมดควบคุม༛
คลียรຏ༛ CLK༛ SL༛ SR༛ QA༛ QB༛ QC༛ QD༛
S0༛ S1༛
0༛ X༛ X༛ X༛ X༛ X༛ ༛ ༛ ༛ ༛
1༛ 1༛ 0༛ ༛ X༛ 1༛
1༛ 1༛ 0༛ ༛ X༛ 1༛
༛
1༛ 1༛ 0༛ ༛ X༛ 1༛
1༛ 1༛ 0༛ ༛ ༛ X༛ 1༛
1༛ 1༛ 0༛ ༛ ༛ X༛ 0༛
1༛ 1༛ 0༛ ༛ X༛ 0༛
༛
1༛ 1༛ 0༛ X༛ 1༛
1༛ 1༛ 0༛ ༛ X༛ 1༛
1༛ 1༛ 0༛ ༛ x༛ 1༛
༛
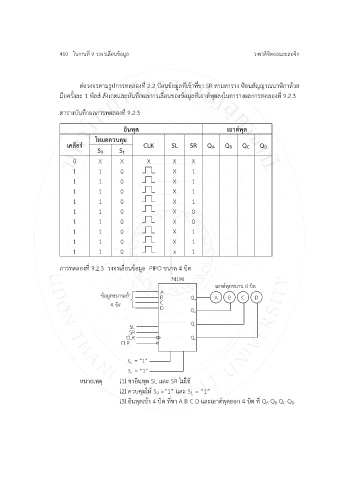
การทดลองทีไ༛9.2.3༛༛วงจรลืไอนขຌอมูล༛༛PIPO༛ขนาด༛4༛บิต༛
A Q
B Q
C Q
D Q
0 S
1 S ༛
༛༛༛༛༛ หมายหตุ༛༛༛ (1)༛ขาอินพุต༛SL༛ละ༛SR༛เม฿ชຌ༛
༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛ (2)༛ควบคุม฿หຌ༛S0༛=1༛ละ༛S1༛=༛1༛༛
༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛༛ (3)༛อินพุตขຌา༛4༛บิต༛ทีไขา༛A༛B༛C༛D༛ละอาตຏพุตออก༛4༛บิต༛ทีไ༛QA༛QB༛QC༛QD༛༛༛