
Page 55 - Untitled
P. 55
༛
วงจรดิจิตอลละลอจิก༛ ༛ ༛บททีไ༛2༛ลอจิกกตพืๅนฐาน༛༛༛37
1
อาตຏพุต (X)
0 t
1
อินพุต (A)
0 t
1
อินพุต (B)
0 t
t t t t
1
4
2
3
(ค)༛เดอะกรมวลาของออรຏกต༛
༛
รูปทีไ༛2.6༛(ตอ)༛
༛
ี
ุ
ิ
༛ ༛ ༛ รูปทีไ༛2.6༛(ค)༛ปຓนเดอะกรมวลา฿นชวงวลา༛t1༛อนพต༛A༛มคาปຓน༛0༛༛ละอินพต༛B༛༛
ุ
มีคาปຓน༛0༛อาตຏพต༛X༛จะมีคาทากับ༛0༛฿นชวงวลา༛t2༛༛อินพุต༛A༛มีคาปຓน༛0༛༛ละอินพต༛B༛มีคาปຓน༛1༛
ุ
ุ
ิ
ุ
ุ
ี
ุ
ั
ี
อาตຏพุต༛X༛จะมคาทากบ༛1༛ชวงวลา༛t3༛อนพต༛A༛มีคาปຓน༛1༛༛ละอินพต༛B༛มคาปຓน༛0༛อาตຏพต༛X༛༛
ี
ิ
จะมคาทากบ༛1༛ละ฿นชวงวลา༛t4༛อนพุต༛A༛มีคาปຓน༛1༛༛ละอนพต༛B༛มีคาปຓน༛1༛อาตຏพุต༛X༛จะมีคา
ุ
ั
ิ
ทากับ༛1༛ซึไงสามารถสรุปละขียนปຓนสมการบูลลีนเดຌดังสมการทีไ༛(2.2)༛
༛
༛ ༛ ༛ ༛ ༛ X༛=༛A+B༛ ༛ ༛ ༛ ༛ ༛ (2.2)༛
༛
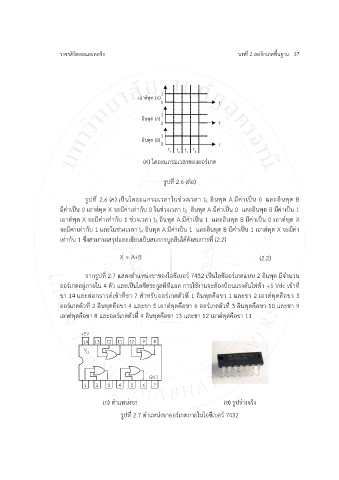
༛ ༛ ༛ จากรูปทีไ༛2.7༛สดงต้าหนงขาของเอซีบอรຏ༛7432༛ปຓนเอซีออรຏกตบบ༛2༛อินพุต༛มีจ้านวน
ออรຏกตอยูภาย฿น༛4༛ตัว༛ละปຓนเอซีตระกูลทีทีอล༛การ฿ชຌงานจะตຌองปງอนรงดันเฟฟງา༛+5༛Vdc༛ขຌาทีไ༛
ุ
ิ
ຏ
ุ
ขา༛14༛ละตอกราวดขຌาทีไขา༛7༛ส้าหรับออรຏกตตัวทีไ༛1༛อนพตคือขา༛1༛ละขา༛2༛อาตຏพตคือขา༛3༛༛
ั
ຏ
ุ
ุ
ุ
ิ
ออรຏกตตวทีไ༛2༛อินพตคือขา༛4༛ละขา༛5༛อาตพตคือขา༛6༛ออรຏกตตวทีไ༛3༛อนพตคือขา༛10༛ละขา༛9༛
ั
อาตຏพุตคือขา༛8༛ละออรຏกตตัวทีไ༛4༛อินพุตคือขา༛13༛ละขา༛12༛อาตຏพุตคือขา༛11༛༛༛
༛
V
CC
༛
༛
(ก)༛ต้าหนงขา (ข)༛รูปรางจริง༛
༛
รูปทีไ༛2.7༛ต้าหนงขาออรຏกตภาย฿นเอซีบอรຏ༛7432༛