
Page 64 - Untitled
P. 64
༛
ีไ
46༛༛༛บทท༛2༛ลอจิกกตพืๅนฐาน༛ ༛ วงจรดิจิตอลละลอจิก༛
༛
༛
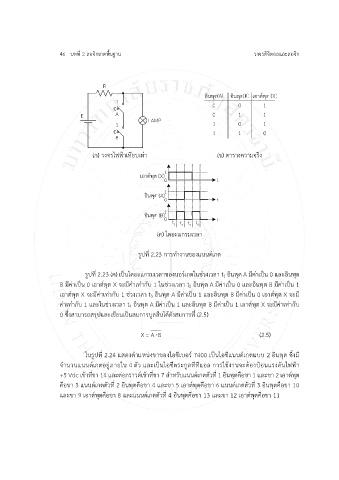
(ก)༛วงจรเฟฟาทียบทา༛ (ข)༛ตารางความจริง༛
ງ
t t t t
1 2 3 4 ༛
(ค)༛เดอะกรมวลา༛
༛
รูปทีไ༛2.23༛การท้างานของนนดຏกต༛
༛
༛ ༛ ༛ รูปทีไ༛2.23༛(ค)༛ปຓนเดอะกรมวลาของนอรຏกต฿นชวงวลา༛t1༛อินพุต༛A༛มีคาปຓน༛0༛ละอินพุต༛
B༛มีคาปຓน༛0༛อาตຏพุต༛X༛จะมีคาทากับ༛1༛฿นชวงวลา༛t2༛อินพุต༛A༛มีคาปຓน༛0༛ละอินพุต༛B༛มีคาปຓน༛1༛
อาตຏพต༛X༛จะมีคาทากับ༛1༛ชวงวลา༛t3༛อนพุต༛A༛มีคาปຓน༛1༛ละอินพุต༛B༛มีคาปຓน༛0༛อาตຏพต༛X༛จะม ี
ุ
ุ
ิ
คาทากับ༛1༛ละ฿นชวงวลา༛t4༛อินพุต༛A༛มีคาปຓน༛1༛ละอินพุต༛B༛มีคาปຓน༛1༛อาตຏพุต༛X༛จะมีคาทากบ༛
ั
0༛ซึไงสามารถสรุปละขียนปຓนสมการบูลลีนเดຌดังสมการทีไ༛(2.5)༛
༛
༛ ༛ ༛ ༛ X = A B༛ ༛ ༛ ༛ ༛ (2.5)༛ ༛ ༛
༛ ༛
ุ
ิ
ຏ
้
༛ ༛ ༛ ฿นรูปทีไ༛2.24༛สดงตาหนงขาของเอซีบอรຏ༛7400༛ปຓนเอซีนนดกตบบ༛2༛อนพต༛ซึไงม ี
ู
ຌ
ู
ຏ
จ้านวนนนดกตอยภาย฿น༛4༛ตว༛ละปຓนเอซีตระกลทีทีอล༛การ฿ชຌงานจะตองปງอนรงดันเฟฟງา༛༛
ั
ຏ
+5༛Vdc༛ขຌาทีไขา༛14༛ละตอกราวดຏขຌาทีไขา༛7༛ส้าหรับนนดกตตัวทีไ༛1༛อินพุตคือขา༛1༛ละขา༛2༛อาตຏพุต
คือขา༛3༛นนดຏกตตัวทีไ༛2༛อินพุตคือขา༛4༛ละขา༛5༛อาตพุตคือขา༛6༛นนดຏกตตวทีไ༛3༛อินพุตคือขา༛10༛
ั
ຏ
ຏ
ละขา༛9༛อาตຏพุตคือขา༛8༛ละนนดกตตัวทีไ༛4༛อินพุตคือขา༛13༛ละขา༛12༛อาตຏพุตคือขา༛11༛༛༛༛༛
༛
༛