
Page 76 - B2B All Year Round Vol.8
P. 76
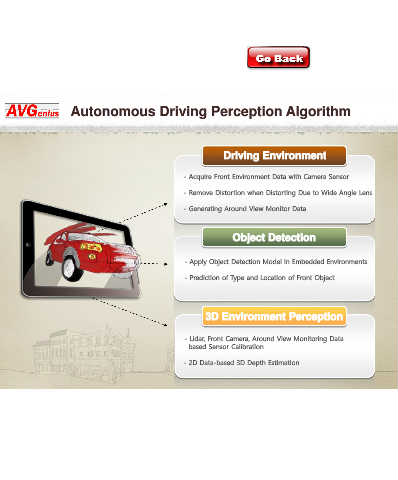
Autonomous Driving Perception Algorithm
Driving Environment
- Acquire Front Environment Data with Camera Sensor
- Remove Distortion when Distorting Due to Wide Angle Lens
- Generating Around View Monitor Data
Object Detection
- Apply Object Detection Model in Embedded Environments
- Prediction of Type and Location of Front Object
3D Environment Perception
- Lidar, Front Camera, Around View Monitoring Data
based Sensor Calibration
- 2D Data-based 3D Depth Estimation