
Page 9 - BUKUTRANSFORMASI
P. 9
Nama: No. Absen: Nama: No. Absen:
koordinat koordinat
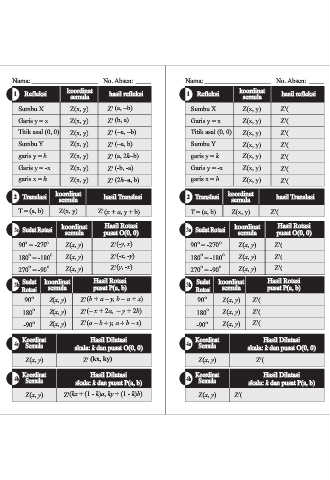
1 Refleksi hasil refleksi 1 Refleksi hasil refleksi
semula semula
Sumbu X Z(x, y) Z¢ (a, -b) Sumbu X Z(x, y) Z¢(
Garis y = x Z(x, y) Z¢ (b, a) Garis y = x Z(x, y) Z¢(
Titik asal (0, 0) Z(x, y) Z¢ (-a, -b) Titik asal (0, 0) Z(x, y) Z¢(
Sumbu Y Z(x, y) Z¢ (-a, b) Sumbu Y Z(x, y) Z¢(
garis y = k Z(x, y) Z¢ (a, 2k-b) garis y = k Z(x, y) Z¢(
Garis y = -x Z(x, y) Z¢ (-b, -a) Garis y = -x Z(x, y) Z¢(
garis x = h Z(x, y) Z¢ (2h-a, b) garis x = h Z(x, y) Z¢(
koordinat koordinat
2 Translasi hasil Translasi 2 Translasi hasil Translasi
semula semula
T = (a, b) Z(x, y) Z¢ (x + a, y + b) T = (a, b) Z(x, y) Z¢(
koordinat Hasil Rotasi koordinat Hasil Rotasi
3a Sudut Rotasi 3a Sudut Rotasi
semula pusat O(0, 0) semula pusat O(0, 0)
O
O
90 = -270 O Z(x, y) Z¢ (-y, x) 90 = -270 O Z(x, y) Z¢(
O
O
180 = -180 O Z(x, y) Z¢ (-x, -y) 180 = -180 O Z(x, y) Z¢(
O
O
270 = -90 O Z(x, y) Z¢ (y, -x) 270 = -90 O Z(x, y) Z¢(
Sudut koordinat Hasil Rotasi Sudut koordinat Hasil Rotasi
3b pusat P(a, b) 3b pusat P(a, b)
Rotasi semula Rotasi semula
O
O
90 Z(x, y) Z¢(b + a - y, b - a + x) 90 Z(x, y) Z¢(
O
O
180 Z(x, y) Z¢(- x + 2a, - y + 2b) 180 Z(x, y) Z¢(
-90 O Z(x, y) Z¢(a - b + y, a + b - x) -90 O Z(x, y) Z¢(
Koordinat Hasil Dilatasi Koordinat Hasil Dilatasi
4a 4a
Semula skala: k dan pusat O(0, 0) Semula skala: k dan pusat O(0, 0)
Z(x, y) Z¢ (kx, ky) Z(x, y) Z¢(
Koordinat Hasil Dilatasi Koordinat Hasil Dilatasi
4b 4b
Semula skala: k dan pusat P(a, b) Semula skala: k dan pusat P(a, b)
Z(x, y) Z¢(kx + (1 - k)a, ky + (1 - k)b) Z(x, y) Z¢(