
Page 24 - חוברת תקצירים
P. 24
"תחנת עבודה אוטונומית"
BS-21-09
מנחה: ד"ר איתן פישר רונן לוי אליאור פחימה Eliorph219@gmail.com Ronenle55@gmail.com
תקציר
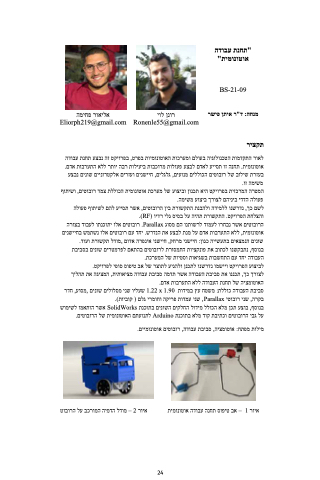
לאור התקדמות הטכנולוגיה בעולם ומערכות האוטונומיות בפרט, בפרויקט זה נבצע תחנת עבודה אוטונומית. תחנה זו תסייע לאדם לבצע פעולות מרוכבות ביעילות רבה יותר ללא התערבות אדם. בעזרת שילוב של רובוטים הכוללים מנועים, גלגלים, חיישנים ועזרים אלקטרוניים שונים נבצע משימה זו. המטרה המרכזית בפרויקט היא תכנון וביצוע של מערכת אוטונומית הכוללת צמד רובוטים, ושיתוף פעולה הדדי ביניהם לצורך ביצוע משימה. לשם כך, נדרשנו ללמידה ולהבנת התקשורת בין הרובוטים, אשר תסייע להם לשיתוף פעולה והצלחת הפרויקט. התקשורת תהיה על בסיס גלי רדיו (RF). הרובוטים אשר נבחרו לעמוד לרשותנו הם מסוג Parallax. רובוטים אלו יתוכנתו לעבוד בצורה אוטונומית, ללא התערבות אדם על מנת לבצע את הנדרש. יחד עם רובוטים אלו נשתמש בחיישנים שונים הנמצאים בתעשייה כגון: חיישני מרחק, חיישני אינפרה אדום ,מודל תקשורת ועוד. בנוסף, נתבקשנו לכתוב את פונקציות התמסורת לרובוטים בהתאם לפרמטרים שונים בסביבת העבודה יחד עם התחשבות בשגיאות וסטיות של המערכת. לביצוע הפרויקט ויישמו נדרשנו לתכנן ולהגיע לתוצר של אב טיפוס סופי לפרויקט. לצורך כך, תכננו את סביבת העבודה אשר תדמה סביבת עבודה מציאותית, המציגה את תהליך האוטומציה של תחנת העבודה ללא התערבות אדם. סביבת העבודה כוללת: משטח עץ במידות 1.90 x 1.22 שעליו שני מסלולים שונים ,מסוע, חדר בקרה, שני רובוטי Parallax, שני עמדות פריקה וחומרי גלם ( קוביות). בנוסף, בוצע תכן מלא הכולל מידול החלקים השונים בתוכנת SolidWorks אשר הותאמו לשימוש על גבי הרובוטים וכתיבת קוד מלא בתוכנת Arduino לתנועתם האוטונומית של הרובוטים.
מילות מפתח: אוטומציה, סביבת עבודה, רובוטים אוטונומיים.
איור 2 – מודל הדמיה המורכב על הרובוט
איור 1 – אב טיפוס תחנה עבודה אוטונומית
24
