
Page 61 - חוברת תקצירים
P. 61
איליה בונדר
ilyabonder@gmail.com
בקרה של קבוצת רובוטים
BS-21-46 ד"ר איתן פישר
תקציר
רובוט הוא מכונה אוטומטית בעלת יכולת תנועה, הנשלטת על ידי בקר ממוחשב. בפרויקט זה נתמקד בפיתוח בקרה עבור רובוטים הנעים בשני צירים ומדמים תכנון תנועה עבור רכבים אוטונומיים ורובוטים קרקעיים באופן כללי. בעבודה נתייחס לבקרה של מספר רובוטים בו-זמנית. הרכב האוטונומי היא אחת ההתפתחויות החשובות ביותר במאה ה- 21. תכנון המסלול הוא אחד הנדבכים העיקריים בתכנון ושיפור רמת האוטומציה של הרובוט והנו הבסיס ליישום וביצוע משימות בצורה בטוחה ומדויקת. בסיס לתהליך זה שהרכב יזהה את מיקומו ומצבו ביחס לסביבה וינווט את דרכו על ידי תכנון. ניתן להגדיר נתיב של רובוט קרקעי ע"י המסלול שהרובוט צריך לעבור בדרך למטרה בסביבה. מטרת הרובוט היא לנוע באופן עצמאי לעבר המטרה תוך כדי חישוב מהירות והזוויות היגוי (להתחשב
בשגיאות) ולבצע את הפעולה.
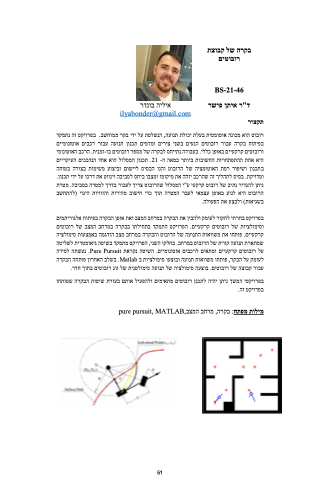
בפרויקט בחרתי לחקור לעומק ולהבין את הבקרה במרחב המצב ואת אופן הבקרה בפיתוח אלגוריתמים וסימולציות של רובוטים קרקעיים. הפרויקט התמקד בתחילתו בבקרה במרחב המצב של רובוטים קרקעיים. פותחו את משוואות התנועה של הרובוט והבקרה במרחב מצב הודגמה באמצעות סימולציה שמתארת תנועה קווית של הרובוט במרחב. בחלקו השני, הפרויקט מתמקד בשיטה גיאומטרית לשליטה על רובוטים קרקעיים ומתאים לרכבים אוטונומיים. השיטה נקראת Pure Pursuit. נעשתה למידה לעומק על הבקר, פותחו משוואות תנועה ובוצעו סימולציות ב Matlab. בשלב האחרון פותחה הבקרה
עבור קבוצה של רובוטים. בוצעה סימולציה של תנועה סימולטנית של זוג רובוטים בתוך חדר.
בפרויקטי המשך ניתן יהיה לתכנן רובוטים מתאימים ולהפעיל אותם בעזרת שיטות הבקרה שפותחו בפרויקט זה.
מילות מפתח: בקרה, מרחב המצב,pure pursuit, MATLAB
61
