
Page 8 - 2020 Spanish ebook
P. 8
Sistema de control híbrido
Control de par, posición y velocidad
consiste en un motor paso a paso “hibrido” y excitador que en conjunto realizan un control independiente y combina las ventajas de
programación de “lazo abierto” y el desempeño de “lazo cerrado”. Además de control de velocidad y posicionamiento de alta precisión,
puede realizar funciones de control que restringen el par generado por el motor a un valor establecido para la operación de empuje.
Hay dos tipos de motor / excitador básicos dentro de la familia de
productos . La serie AZ cuenta con un sensor absoluto y la
Serie AZ serie AR tiene un sensor con resolutor.
No se Serie AR
requiere
batería
Sensor absoluto
integrado de
rotación múltiple Sensor absoluto (ABZO)
Sensor de detección de posición del rotor
Desempeño
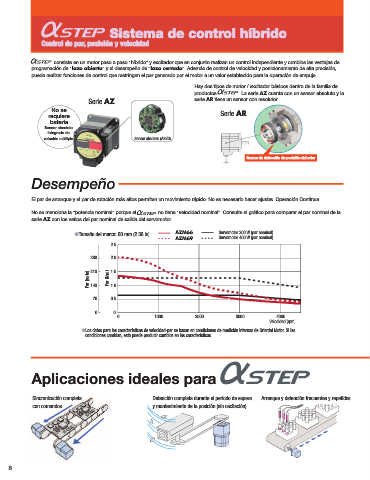
El par de arranque y el par de rotación más altos permiten un movimiento rápido. No es necesario hacer ajustes. Operación Continua.
No se menciona la “potencia nominal” porque el no tiene “velocidad nominal”. Consulte el gráfico para comparar el par nominal de la
serie AZ con los vatios del par nominal de salida del servomotor.
●Tamaño del marco: 60 mm (2.36 in) AZM66 Servomotor 200 W (par nominal)
AZM69 Servomotor 400 W (par nominal)
2.5
280 2.0
Par [oz-in] 210 Par [N·m] 1.5
140
1.0
70 0.5
0 0
0 1000 2000 3000 4000
Velocidad [rpm]
●Los datos para las características de velocidad-par se basan en condiciones de medición internas de Oriental Motor. Si las
condiciones cambian, esto puede producir cambios en las características.
Aplicaciones ideales para
Sincronización completa Detención completa durante el período de espera Arranque y detención frecuentes y repetidos
con comandos y mantenimiento de la posición (sin oscilación)
8