
Page 32 - Marine Magnetometer Processing
P. 32
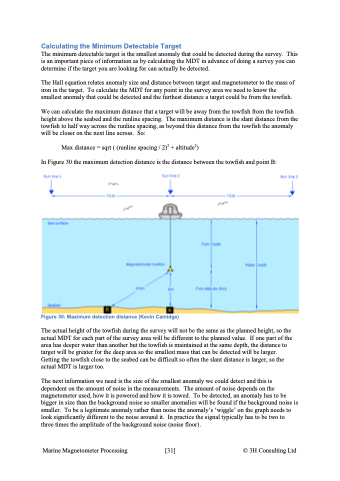
Calculating the Minimum Detectable Target The minimum detectable target is the smallest anomaly that could be detected during the survey. This is an important piece of information as by calculating the MDT in advance of doing a survey you can determine if the target you are looking for can actually be detected. The Hall equation relates anomaly size and distance between target and magnetometer to the mass of iron in the target. To calculate the MDT for any point in the survey area we need to know the smallest anomaly that could be detected and the furthest distance a target could be from the towfish. We can calculate the maximum distance that a target will be away from the towfish from the towfish height above the seabed and the runline spacing. The maximum distance is the slant distance from the towfish to half way across the runline spacing, as beyond this distance from the towfish the anomaly will be closer on the next line across. So: Max distance = sqrt ( (runline spacing / 2)2 + altitude2) In Figure 30 the maximum detection distance is the distance between the towfish and point B: Figure 30: Maximum detection distance (Kevin Camidge) The actual height of the towfish during the survey will not be the same as the planned height, so the actual MDT for each part of the survey area will be different to the planned value. If one part of the area has deeper water than another but the towfish is maintained at the same depth, the distance to target will be greater for the deep area so the smallest mass that can be detected will be larger. Getting the towfish close to the seabed can be difficult so often the slant distance is larger, so the actual MDT is larger too. The next information we need is the size of the smallest anomaly we could detect and this is dependent on the amount of noise in the measurements. The amount of noise depends on the magnetometer used, how it is powered and how it is towed. To be detected, an anomaly has to be bigger in size than the background noise so smaller anomalies will be found if the background noise is smaller. To be a legitimate anomaly rather than noise the anomaly’s ‘wiggle’ on the graph needs to look significantly different to the noise around it. In practice the signal typically has to be two to three times the amplitude of the background noise (noise floor). Marine Magnetometer Processing \[31\] © 3H Consulting Ltd
