
Page 107 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 107
operator experience, and just plain lack of knowledge of the situation. This subject is so broad that a small chapter cannot possibly do it justice; therefore, the discussion will deal with some basic concepts and allow the reader to further research this topic separately.
4.1.1 Basic thruster control
As discussed further in Chapter 6, basic ROV mobility is achieved through control of thrusters to reactively vector fluid for vehicle movement. In the early days of ROVs, each electrical thruster motor (driving a propeller) was controlled individually via a rheostat linked directly to the thruster. This made for a dreadfully difficult control regime! As the technology evolved, control mechanisms arose allowing for a more intuitive humanmachine interface. Later iterations gave rise to the joy- stick for scaling thruster output, thus allowing thrust vectoring and, hence, finer control of vehicle movement. Logic drive can overlie (or replace) the direct drive of a joystick (which will be exam- ined later in this section). The basic paradigm of “sense, plan, and act” works for a human as well as a computer. As computer control of machines evolves, the “Human-in-the-Loop” control will continually be replaced with automation.
For direct human control of thrusters, a joystick is normally used. The joystick typically outputs a pulse width modulation signal (or some other electrical scaling signal) to direct motor output in some linear fashion. That signal can control power output to either an electric motor (for electrical thrusters) or a hydraulic valve pack/servo (for hydraulic thrusters).
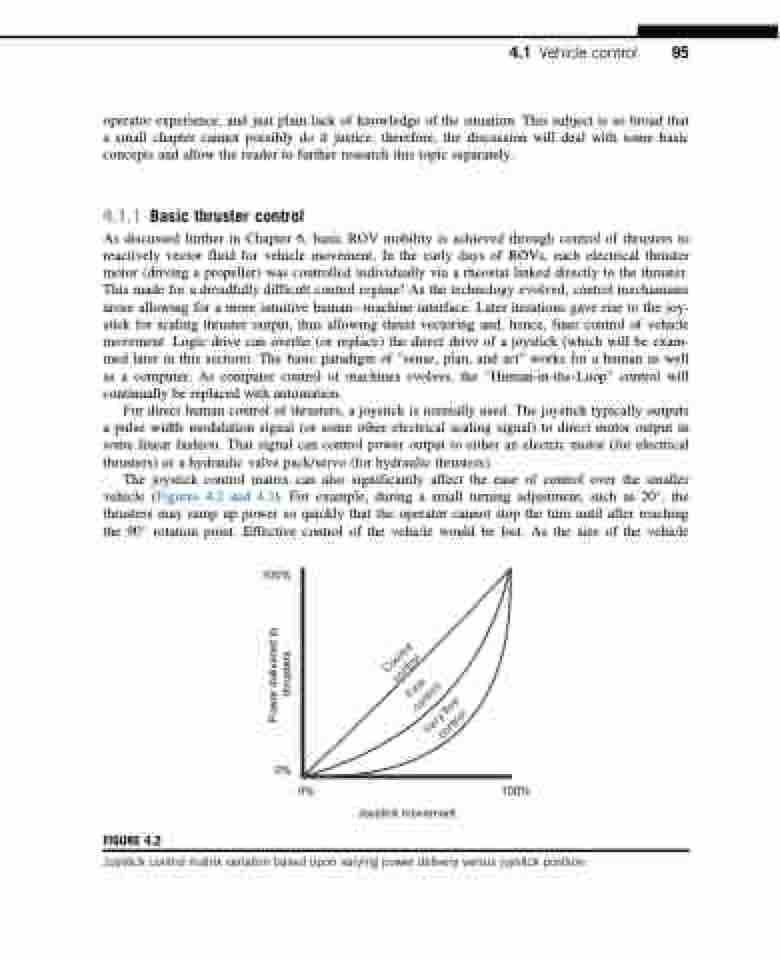
The joystick control matrix can also significantly affect the ease of control over the smaller
vehicle (Figures 4.2 and 4.3). For example, during a small turning adjustment, such as 20 , the thrusters may ramp up power so quickly that the operator cannot stop the turn until after reaching the 90 rotation point. Effective control of the vehicle would be lost. As the size of the vehicle
FIGURE 4.2
0%
4.1 Vehicle control 95
100%
0%
100%
Joystick movement
Joystick control matrix variation based upon varying power delivery versus joystick position.
Power delivered to thrusters
Course control
Fine control
Very fine control
