
Page 135 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 135
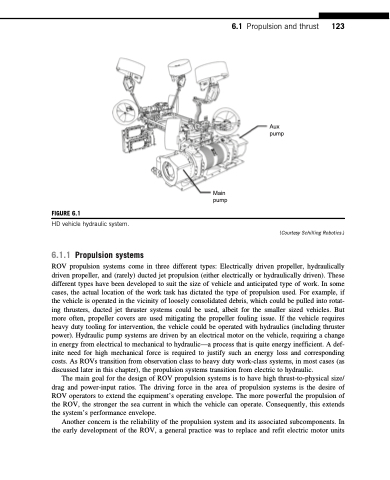
FIGURE 6.1
HD vehicle hydraulic system.
6.1.1 Propulsion systems
(Courtesy Schilling Robotics.)
Main pump
6.1 Propulsion and thrust 123
Aux pump
ROV propulsion systems come in three different types: Electrically driven propeller, hydraulically driven propeller, and (rarely) ducted jet propulsion (either electrically or hydraulically driven). These different types have been developed to suit the size of vehicle and anticipated type of work. In some cases, the actual location of the work task has dictated the type of propulsion used. For example, if the vehicle is operated in the vicinity of loosely consolidated debris, which could be pulled into rotat- ing thrusters, ducted jet thruster systems could be used, albeit for the smaller sized vehicles. But more often, propeller covers are used mitigating the propeller fouling issue. If the vehicle requires heavy duty tooling for intervention, the vehicle could be operated with hydraulics (including thruster power). Hydraulic pump systems are driven by an electrical motor on the vehicle, requiring a change in energy from electrical to mechanical to hydraulic—a process that is quite energy inefficient. A def- inite need for high mechanical force is required to justify such an energy loss and corresponding costs. As ROVs transition from observation class to heavy duty work-class systems, in most cases (as discussed later in this chapter), the propulsion systems transition from electric to hydraulic.
The main goal for the design of ROV propulsion systems is to have high thrust-to-physical size/ drag and power-input ratios. The driving force in the area of propulsion systems is the desire of ROV operators to extend the equipment’s operating envelope. The more powerful the propulsion of the ROV, the stronger the sea current in which the vehicle can operate. Consequently, this extends the system’s performance envelope.
Another concern is the reliability of the propulsion system and its associated subcomponents. In the early development of the ROV, a general practice was to replace and refit electric motor units
