
Page 162 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 162
150 CHAPTER 7 Power and Telemetry
LN
1
2
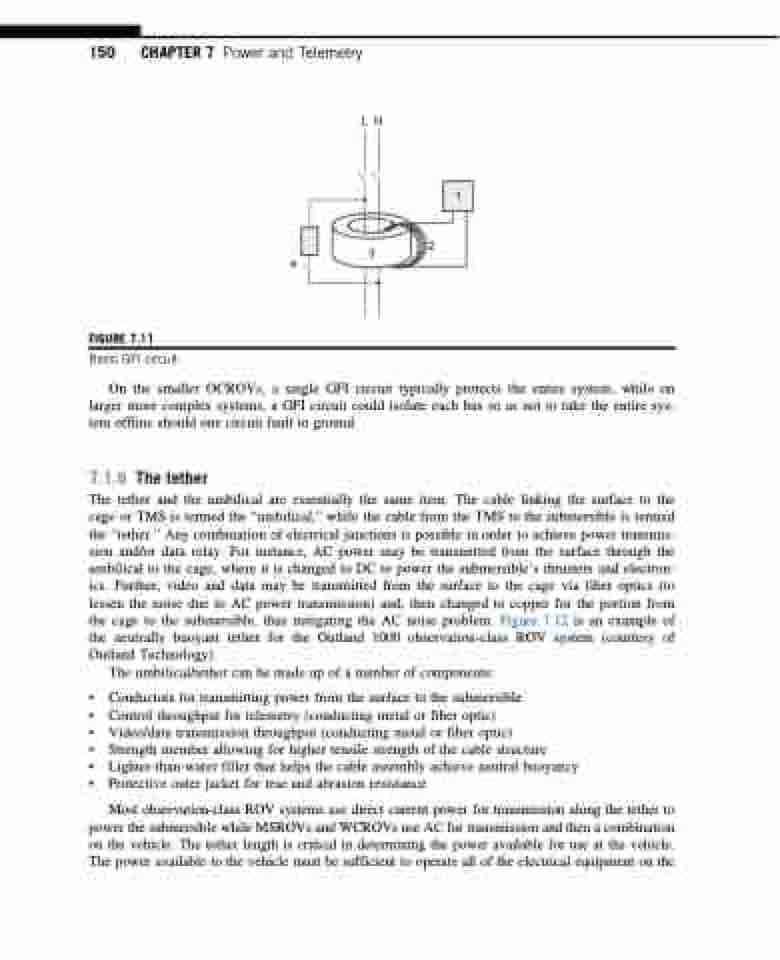
FIGURE 7.11
Basic GFI circuit.
4
3
On the smaller OCROVs, a single GFI circuit typically protects the entire system, while on larger more complex systems, a GFI circuit could isolate each bus so as not to take the entire sys- tem offline should one circuit fault to ground.
7.1.6 The tether
The tether and the umbilical are essentially the same item. The cable linking the surface to the cage or TMS is termed the “umbilical,” while the cable from the TMS to the submersible is termed the “tether.” Any combination of electrical junctions is possible in order to achieve power transmis- sion and/or data relay. For instance, AC power may be transmitted from the surface through the umbilical to the cage, where it is changed to DC to power the submersible’s thrusters and electron- ics. Further, video and data may be transmitted from the surface to the cage via fiber optics (to lessen the noise due to AC power transmission) and, then changed to copper for the portion from the cage to the submersible, thus mitigating the AC noise problem. Figure 7.12 is an example of the neutrally buoyant tether for the Outland 1000 observation-class ROV system (courtesy of Outland Technology).
The umbilical/tether can be made up of a number of components:
• Conductors for transmitting power from the surface to the submersible
• Control throughput for telemetry (conducting metal or fiber optic)
• Video/data transmission throughput (conducting metal or fiber optic)
• Strength member allowing for higher tensile strength of the cable structure
• Lighter-than-water filler that helps the cable assembly achieve neutral buoyancy
• Protective outer jacket for tear and abrasion resistance
Most observation-class ROV systems use direct current power for transmission along the tether to power the submersible while MSROVs and WCROVs use AC for transmission and then a combination on the vehicle. The tether length is critical in determining the power available for use at the vehicle. The power available to the vehicle must be sufficient to operate all of the electrical equipment on the
