
Page 337 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 337
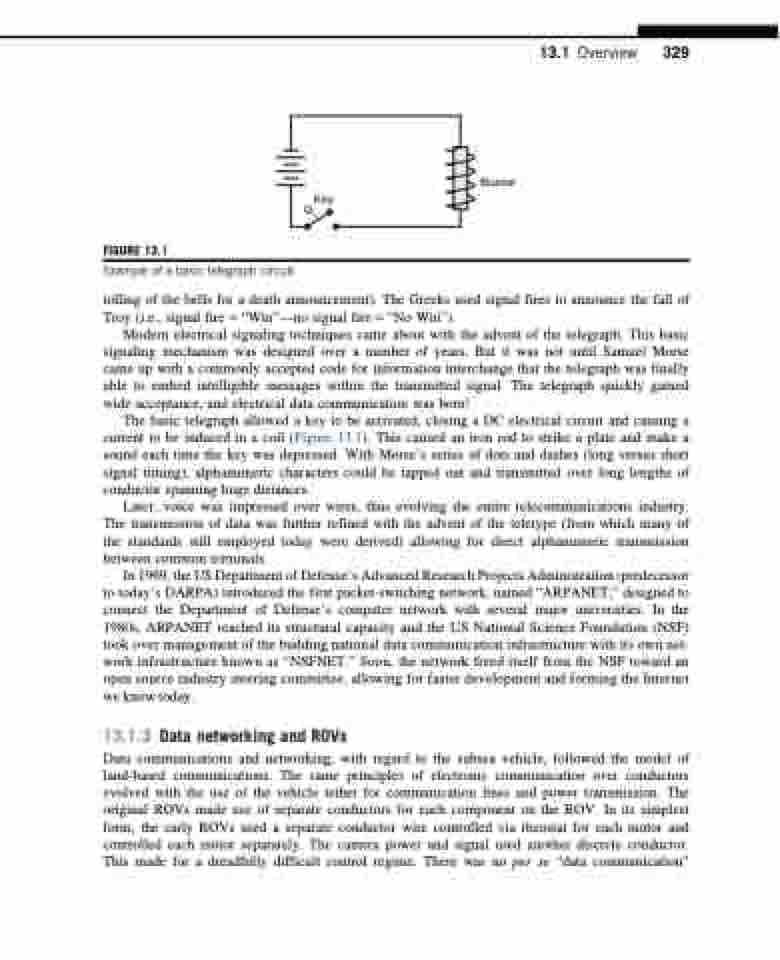
FIGURE 13.1
Key
Buzzer
13.1 Overview 329
Example of a basic telegraph circuit.
tolling of the bells for a death announcement). The Greeks used signal fires to announce the fall of Troy (i.e., signal fire 5 “Win”—no signal fire 5 “No Win”).
Modern electrical signaling techniques came about with the advent of the telegraph. This basic signaling mechanism was designed over a number of years. But it was not until Samuel Morse came up with a commonly accepted code for information interchange that the telegraph was finally able to embed intelligible messages within the transmitted signal. The telegraph quickly gained wide acceptance, and electrical data communication was born!
The basic telegraph allowed a key to be activated, closing a DC electrical circuit and causing a current to be induced in a coil (Figure 13.1). This caused an iron rod to strike a plate and make a sound each time the key was depressed. With Morse’s series of dots and dashes (long versus short signal timing), alphanumeric characters could be tapped out and transmitted over long lengths of conductor spanning huge distances.
Later, voice was impressed over wires, thus evolving the entire telecommunications industry. The transmission of data was further refined with the advent of the teletype (from which many of the standards still employed today were derived) allowing for direct alphanumeric transmission between common terminals.
In 1969, the US Department of Defense’s Advanced Research Projects Administration (predecessor to today’s DARPA) introduced the first packet-switching network, named “ARPANET,” designed to connect the Department of Defense’s computer network with several major universities. In the 1980s, ARPANET reached its structural capacity and the US National Science Foundation (NSF) took over management of the budding national data communication infrastructure with its own net- work infrastructure known as “NSFNET.” Soon, the network freed itself from the NSF toward an open source industry steering committee, allowing for faster development and forming the Internet we know today.
13.1.3 Data networking and ROVs
Data communications and networking, with regard to the subsea vehicle, followed the model of land-based communications. The same principles of electronic communication over conductors evolved with the use of the vehicle tether for communication lines and power transmission. The original ROVs made use of separate conductors for each component on the ROV. In its simplest form, the early ROVs used a separate conductor wire controlled via rheostat for each motor and controlled each motor separately. The camera power and signal used another discrete conductor. This made for a dreadfully difficult control regime. There was no per se “data communication”
