
Page 425 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 425
418 CHAPTER 15 Sonar
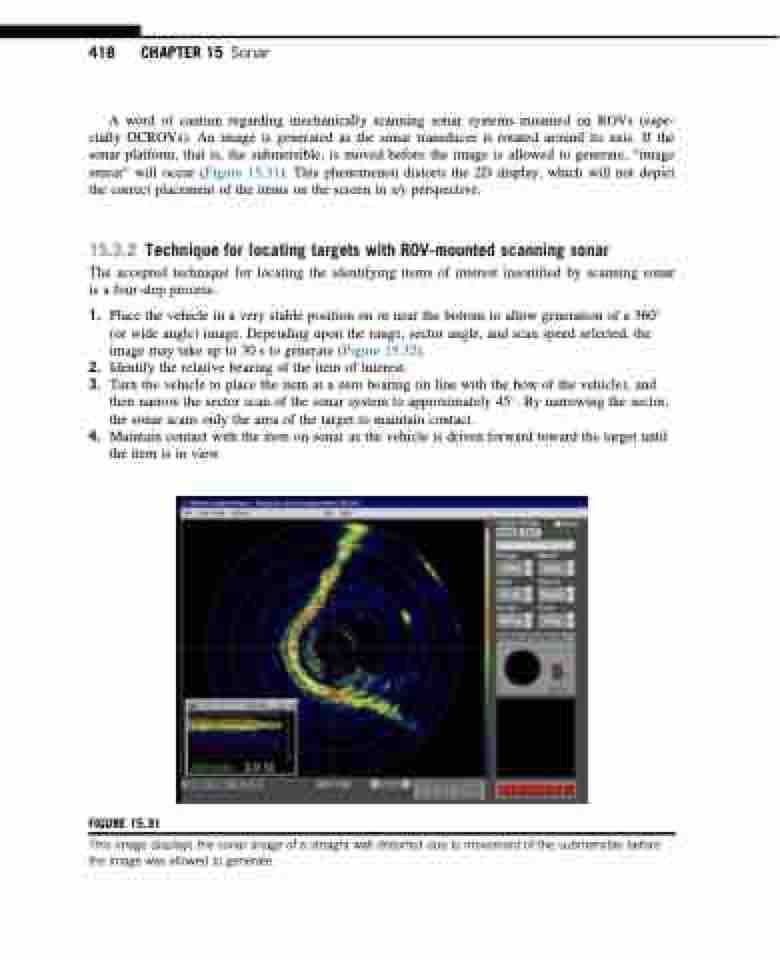
A word of caution regarding mechanically scanning sonar systems mounted on ROVs (espe- cially OCROVs): An image is generated as the sonar transducer is rotated around its axis. If the sonar platform, that is, the submersible, is moved before the image is allowed to generate, “image smear” will occur (Figure 15.31). This phenomenon distorts the 2D display, which will not depict the correct placement of the items on the screen in x/y perspective.
15.3.2 Technique for locating targets with ROV-mounted scanning sonar
The accepted technique for locating the identifying items of interest insonified by scanning sonar
is a four-step process:
1. Place the vehicle in a very stable position on or near the bottom to allow generation of a 360 (or wide angle) image. Depending upon the range, sector angle, and scan speed selected, the image may take up to 30 s to generate (Figure 15.32).
2. Identify the relative bearing of the item of interest.
3. Turn the vehicle to place the item at a zero bearing (in line with the bow of the vehicle), and
the sonar scans only the area of the target to maintain contact.
4. Maintain contact with the item on sonar as the vehicle is driven forward toward the target until
the item is in view.
FIGURE 15.31
This image displays the sonar image of a straight wall distorted due to movement of the submersible before the image was allowed to generate.
then narrow the sector scan of the sonar system to approximately 45 . By narrowing the sector,
