
Page 452 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 452
16.9 Operational considerations 445
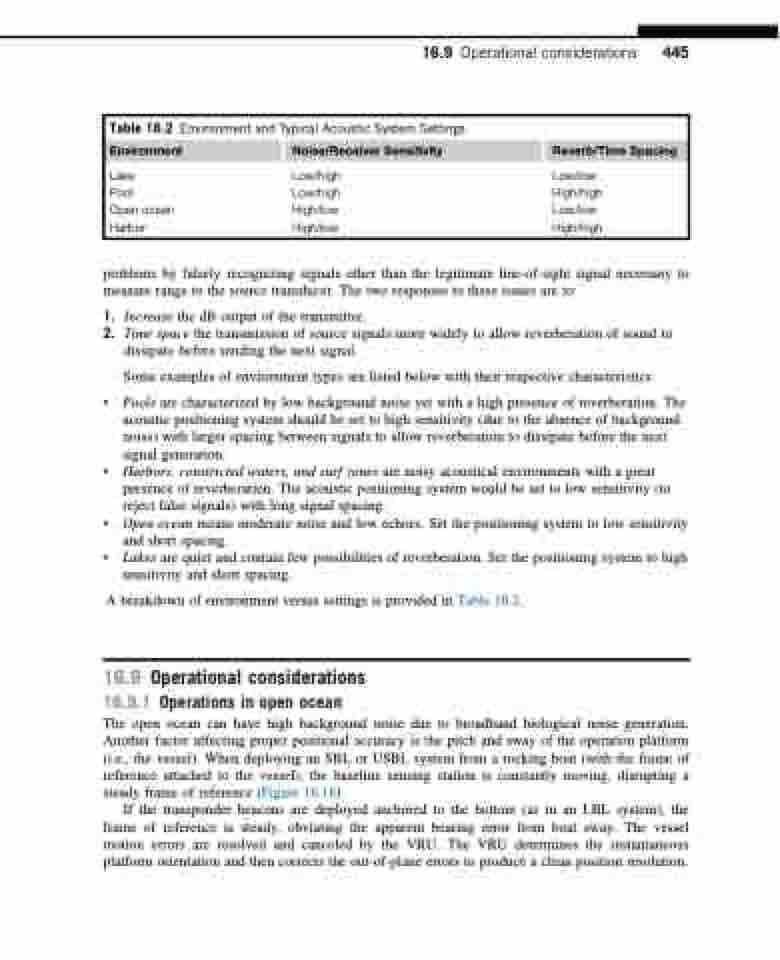
Table 16.2 Environment and Typical Acoustic System Settings
Environment Noise/Receiver Sensitivity Reverb/Time Spacing
Lake
Pool
Open ocean Harbor
Low/high Low/high High/low High/low
Low/low High/high Low/low High/high
problems by falsely recognizing signals other than the legitimate line-of-sight signal necessary to measure range to the source transducer. The two responses to these issues are to:
1. Increase the dB output of the transmitter.
2. Time space the transmission of source signals more widely to allow reverberation of sound to
dissipate before sending the next signal.
Some examples of environment types are listed below with their respective characteristics:
• Pools are characterized by low background noise yet with a high presence of reverberation. The acoustic positioning system should be set to high sensitivity (due to the absence of background noise) with larger spacing between signals to allow reverberation to dissipate before the next signal generation.
• Harbors, constricted waters, and surf zones are noisy acoustical environments with a great presence of reverberation. The acoustic positioning system would be set to low sensitivity (to reject false signals) with long signal spacing.
• Open ocean means moderate noise and low echoes. Set the positioning system to low sensitivity and short spacing.
• Lakes are quiet and contain few possibilities of reverberation. Set the positioning system to high sensitivity and short spacing.
A breakdown of environment versus settings is provided in Table 16.2.
16.9 Operational considerations
16.9.1 Operations in open ocean
The open ocean can have high background noise due to broadband biological noise generation. Another factor affecting proper positional accuracy is the pitch and sway of the operation platform (i.e., the vessel). When deploying an SBL or USBL system from a rocking boat (with the frame of reference attached to the vessel), the baseline sensing station is constantly moving, disrupting a steady frame of reference (Figure 16.18).
If the transponder beacons are deployed anchored to the bottom (as in an LBL system), the frame of reference is steady, obviating the apparent bearing error from boat sway. The vessel motion errors are resolved and canceled by the VRU. The VRU determines the instantaneous platform orientation and then corrects the out-of-plane errors to produce a clean position resolution.
