
Page 453 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 453
446 CHAPTER 16 Acoustic Positioning
Hull
Receiver
Depth
Offset
Sub
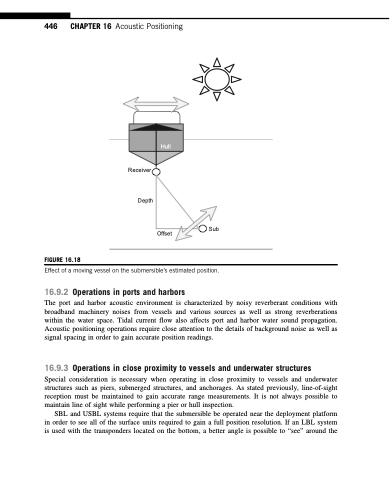
FIGURE 16.18
Effect of a moving vessel on the submersible’s estimated position.
16.9.2 Operations in ports and harbors
The port and harbor acoustic environment is characterized by noisy reverberant conditions with broadband machinery noises from vessels and various sources as well as strong reverberations within the water space. Tidal current flow also affects port and harbor water sound propagation. Acoustic positioning operations require close attention to the details of background noise as well as signal spacing in order to gain accurate position readings.
16.9.3 Operations in close proximity to vessels and underwater structures
Special consideration is necessary when operating in close proximity to vessels and underwater structures such as piers, submerged structures, and anchorages. As stated previously, line-of-sight reception must be maintained to gain accurate range measurements. It is not always possible to maintain line of sight while performing a pier or hull inspection.
SBL and USBL systems require that the submersible be operated near the deployment platform in order to see all of the surface units required to gain a full position resolution. If an LBL system is used with the transponders located on the bottom, a better angle is possible to “see” around the
