
Page 544 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 544
20.1 Manipulator-operated tooling 541
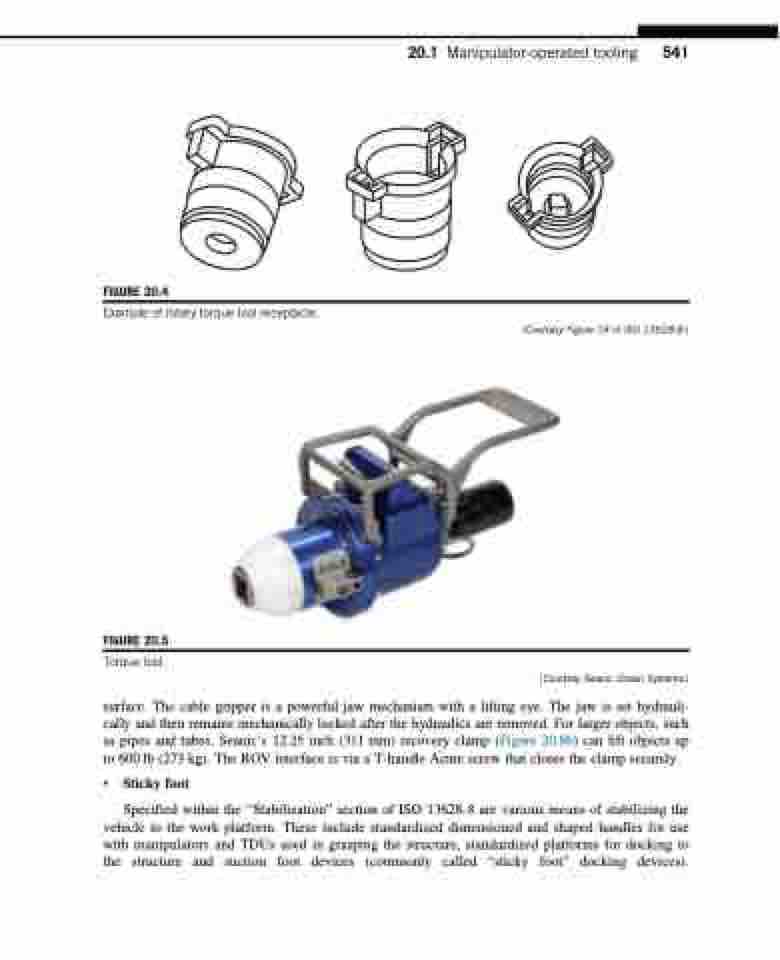
FIGURE 20.4
Example of rotary torque tool receptacle.
(Courtesy Figure 18 of ISO 13628-8.)
FIGURE 20.5
Torque tool.
surface. The cable gripper is a powerful jaw mechanism with a lifting eye. The jaw is set hydrauli- cally and then remains mechanically locked after the hydraulics are removed. For larger objects, such as pipes and tubes, Seanic’s 12.25 inch (311 mm) recovery clamp (Figure 20.8b) can lift objects up to 600 lb (273 kg). The ROV interface is via a T-handle Acme screw that closes the clamp securely.
• Sticky foot
Specified within the “Stabilization” section of ISO 13628-8 are various means of stabilizing the vehicle to the work platform. These include standardized dimensioned and shaped handles for use with manipulators and TDUs used in grasping the structure, standardized platforms for docking to the structure and suction foot devices (commonly called “sticky foot” docking devices).
(Courtesy Seanic Ocean Systems.)
