
Page 573 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 573
572 CHAPTER 21 Practical Applications
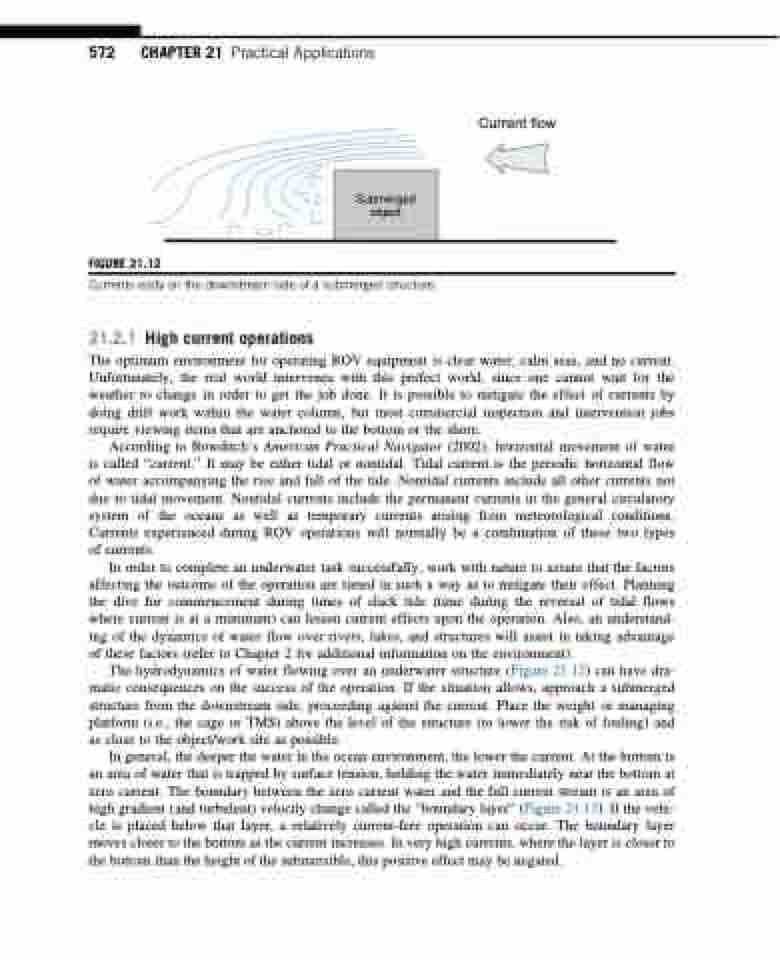
Current flow
FIGURE 21.12
Currents eddy on the downstream side of a submerged structure.
21.2.1 High current operations
Submerged object
The optimum environment for operating ROV equipment is clear water, calm seas, and no current. Unfortunately, the real world intervenes with this perfect world, since one cannot wait for the weather to change in order to get the job done. It is possible to mitigate the effect of currents by doing drift work within the water column, but most commercial inspection and intervention jobs require viewing items that are anchored to the bottom or the shore.
According to Bowditch’s American Practical Navigator (2002), horizontal movement of water is called “current.” It may be either tidal or nontidal. Tidal current is the periodic horizontal flow of water accompanying the rise and fall of the tide. Nontidal currents include all other currents not due to tidal movement. Nontidal currents include the permanent currents in the general circulatory system of the oceans as well as temporary currents arising from meteorological conditions. Currents experienced during ROV operations will normally be a combination of these two types of currents.
In order to complete an underwater task successfully, work with nature to assure that the factors affecting the outcome of the operation are timed in such a way as to mitigate their effect. Planning the dive for commencement during times of slack tide (time during the reversal of tidal flows where current is at a minimum) can lessen current effects upon the operation. Also, an understand- ing of the dynamics of water flow over rivers, lakes, and structures will assist in taking advantage of these factors (refer to Chapter 2 for additional information on the environment).
The hydrodynamics of water flowing over an underwater structure (Figure 21.12) can have dra- matic consequences on the success of the operation. If the situation allows, approach a submerged structure from the downstream side, proceeding against the current. Place the weight or managing platform (i.e., the cage or TMS) above the level of the structure (to lower the risk of fouling) and as close to the object/work site as possible.
In general, the deeper the water in the ocean environment, the lower the current. At the bottom is an area of water that is trapped by surface tension, holding the water immediately near the bottom at zero current. The boundary between the zero current water and the full current stream is an area of high gradient (and turbulent) velocity change called the “boundary layer” (Figure 21.13). If the vehi- cle is placed below that layer, a relatively current-free operation can occur. The boundary layer moves closer to the bottom as the current increases. In very high currents, where the layer is closer to the bottom than the height of the submersible, this positive effect may be negated.
