
Page 637 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 637
objective of the sonar target is to give the ROV or diver a direct visual path to the target
on the bottom via the buoy line. A suggestion for a low-cost sonar target is to fabricate an approximately 3 ft (1 m) cubed metal box structure wrapped in chicken wire, which reflects high-frequency sonar waves at all angles of incidence.
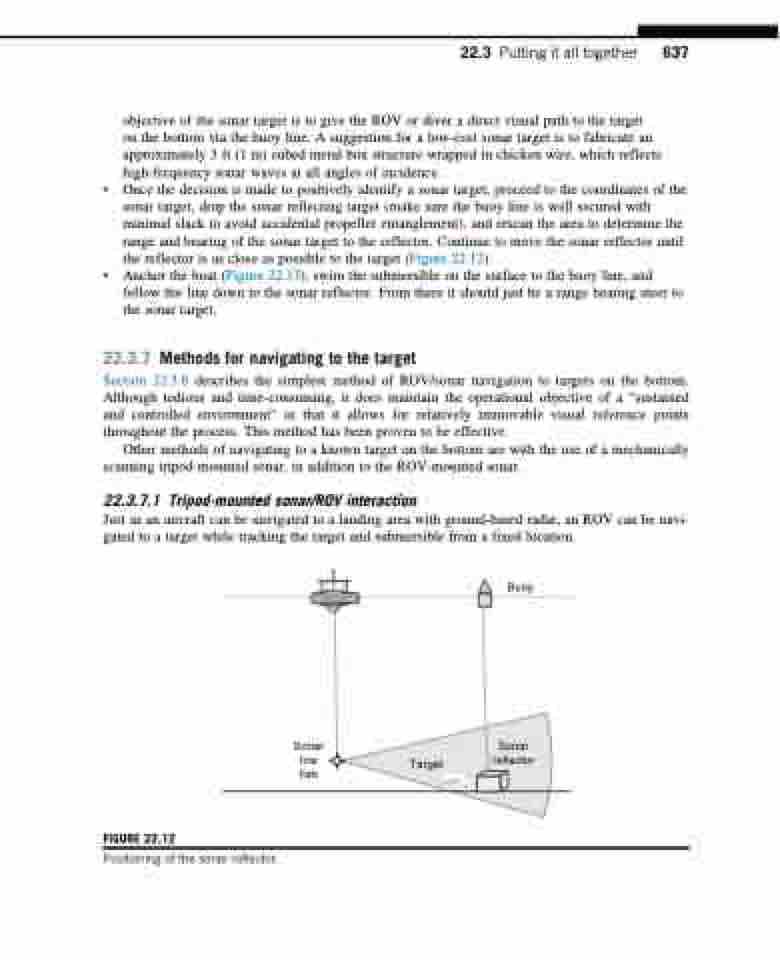
• Once the decision is made to positively identify a sonar target, proceed to the coordinates of the sonar target, drop the sonar reflecting target (make sure the buoy line is well secured with minimal slack to avoid accidental propeller entanglement), and rescan the area to determine the range and bearing of the sonar target to the reflector. Continue to move the sonar reflector until the reflector is as close as possible to the target (Figure 22.12).
• Anchor the boat (Figure 22.13), swim the submersible on the surface to the buoy line, and follow the line down to the sonar reflector. From there it should just be a range bearing steer to the sonar target.
22.3.7 Methods for navigating to the target
Section 22.3.6 describes the simplest method of ROV/sonar navigation to targets on the bottom. Although tedious and time-consuming, it does maintain the operational objective of a “sustained and controlled environment” in that it allows for relatively immovable visual reference points throughout the process. This method has been proven to be effective.
Other methods of navigating to a known target on the bottom are with the use of a mechanically scanning tripod-mounted sonar, in addition to the ROV-mounted sonar.
22.3.7.1 Tripod-mounted sonar/ROV interaction
Just as an aircraft can be navigated to a landing area with ground-based radar, an ROV can be navi- gated to a target while tracking the target and submersible from a fixed location.
22.3 Putting it all together 637
Buoy
Sonar Sonar tow Target reflector fish
FIGURE 22.12
Positioning of the sonar reflector.
