
Page 85 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 85
3.5 Design theory 73
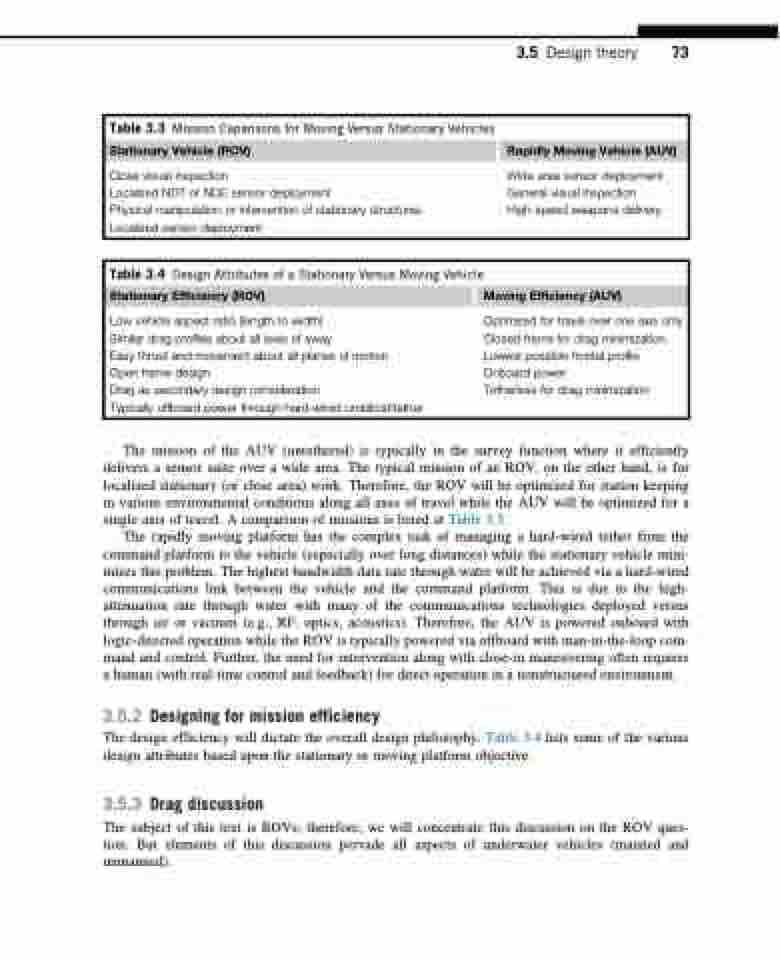
Table 3.3 Mission Caparisons for Moving Versus Stationary Vehicles
Stationary Vehicle (ROV) Rapidly Moving Vehicle (AUV)
Close visual inspection
Localized NDT or NDE sensor deployment
Physical manipulation or intervention of stationary structures Localized sensor deployment
Wide area sensor deployment General visual inspection High-speed weapons delivery
Table 3.4 Design Attributes of a Stationary Versus Moving Vehicle
Stationary Efficiency (ROV) Moving Efficiency (AUV)
Low vehicle aspect ratio (length to width)
Similar drag profiles about all axes of sway
Easy thrust and movement about all planes of motion
Open frame design
Drag as secondary design consideration
Typically offboard power through hard-wired umbilical/tether
Optimized for travel over one axis only Closed frame for drag minimization Lowest possible frontal profile Onboard power
Tetherless for drag minimization
The mission of the AUV (untethered) is typically in the survey function where it efficiently delivers a sensor suite over a wide area. The typical mission of an ROV, on the other hand, is for localized stationary (or close area) work. Therefore, the ROV will be optimized for station keeping in various environmental conditions along all axes of travel while the AUV will be optimized for a single axis of travel. A comparison of missions is listed at Table 3.3.
The rapidly moving platform has the complex task of managing a hard-wired tether from the command platform to the vehicle (especially over long distances) while the stationary vehicle mini- mizes this problem. The highest bandwidth data rate through water will be achieved via a hard-wired communications link between the vehicle and the command platform. This is due to the high- attenuation rate through water with many of the communications technologies deployed versus through air or vacuum (e.g., RF, optics, acoustics). Therefore, the AUV is powered onboard with logic-directed operation while the ROV is typically powered via offboard with man-in-the-loop com- mand and control. Further, the need for intervention along with close-in maneuvering often requires a human (with real-time control and feedback) for direct operation in a nonstructured environment.
3.5.2 Designing for mission efficiency
The design efficiency will dictate the overall design philosophy. Table 3.4 lists some of the various
design attributes based upon the stationary or moving platform objective.
3.5.3 Drag discussion
The subject of this text is ROVs; therefore, we will concentrate this discussion on the ROV ques- tion. But elements of this discussion pervade all aspects of underwater vehicles (manned and unmanned).
