
Page 67 - คู่มือหลักสูตรมาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
P. 67
การพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์
มาตรฐานอาชีพและคุณวุฒิวิชาชีพ สาขาวิชาชีพเทคโนโลยีสารสนเทศและการสื่อสาร และดิจิทัลคอนเทนต์
มาตรฐานอาชีพ สาขาวิชาชีพแมคคาทรอนิกส์ และสาขาคลัสเตอร์หุ่นยนต์
การประยุกต์ใช้งาน
โดยทั่วไปจะใช้ในการหยิบยกชิ้นงาน (Pick-and-Place) หรือป้อนชิ้นงานเข้า
เครื่องจักร เพราะสามารถเคลื่อนที่เข้าออกบริเวณที่เป็นช่องโพรงเล็กๆ ได้สะดวก
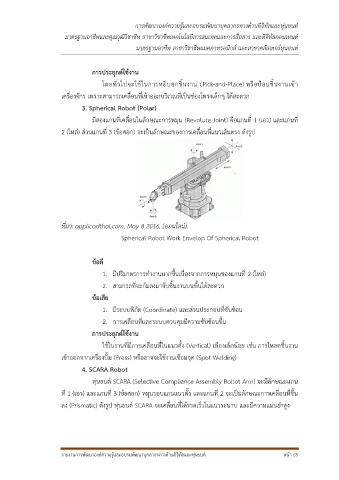
3. Spherical Robot (Polar)
มีสองแกนที่เคลื่อนในลักษณะการหมุน (Revolute Joint) คือแกนที่ 1 (เอว) และแกนที่
2 (ไหล่) ส่วนแกนที่ 3 (ข้อศอก) จะเป็นลักษณะของการเคลื่อนที่แนวเส้นตรง ดังรูป
ที่มา: applicadthai.com, May 8 2016, [ออนไลน์].
Spherical Robot Work Envelop Of Spherical Robot
ข้อดี
1. มีปริมาตรการท างานมากขึ้นเนื่องจากการหมุนของแกนที่ 2 (ไหล่)
2. สามารถที่จะก้มลงมาจับชิ้นงานบนพื้นได้สะดวก
ข้อเสีย
1. มีระบบพิกัด (Coordinate) และส่วนประกอบที่ซับซ้อน
2. การเคลื่อนที่และระบบควบคุมมีความซับซ้อนขึ้น
การประยุกต์ใช้งาน
ใช้ในงานที่มีการเคลื่อนที่ในแนวตั้ง (Vertical) เพียงเล็กน้อย เช่น การโหลดชิ้นงาน
เข้าออกจากเครื่องปั้ม (Press) หรืออาจจะใช้งานเชื่อมจุด (Spot Welding)
4. SCARA Robot
หุ่นยนต์ SCARA (Selective Compliance Assembly Robot Arm) จะมีลักษณะแกน
ที่ 1 (เอว) และแกนที่ 3 (ข้อศอก) หมุนรอบแกนแนวตั้ง และแกนที่ 2 จะเป็นลักษณะการเคลื่อนที่ขึ้น
ลง (Prismatic) ดังรูป หุ่นยนต์ SCARA จะเคลื่อนที่ได้รวดเร็วในแนวระนาบ และมีความแม่นย าสูง
รายงานการพัฒนาองค์ความรู้และอบรมพัฒนาบุคลากรทางด้านดิจิทัลและหุ่นยนต์ หน้า 65