
Page 126 - ArduinoและPOP-BOT
P. 126
126
ในกิ จกรรมนี้ จะเพิ่ มเติ มสวิ ตช เข าไปเพื่ อใช ในการควบคุ มทิ ศทางการหมุ นของเซอร โวมอเตอร
A9.2.1 เป ดโปรแกรม Arduino IDE เขี ยนโปรแกรมภาษา C ตามโปรแกรมที่ A9-2
A9.2.2 จากนั้ นทํ าการคอมไพล แล วอั ปโหลดไปยั งหุ นยนต POP-BOT จากนั้ นป ดสวิ ตช ปลดสายดาวน โหลดออก
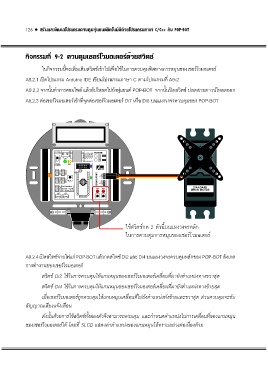
A9.2.3 ต อเซอร โวมอเตอร เข าที่ จุ ดต อเซอร โวมอเตอร Di7 หรื อ Di8 บนแผงวงจรควบคุ มของ POP-BOT
RS-232
4-12Vdc MOTOR Distance=P8robCM RAWoData=i307rR -
ON + ON 14: Speaker 3 : MotorA1 5 : MotorA2 9 : MotorB1 6 : MotorB2 A B
BAT
POWER
SERVO PORT +Vm - 8
1
14/A0
15/A1
RESET ATMEGA168 +Vm -
16/A2
18/SDA/A4
Port function 7 STANDARD
Number : Digital Di2 Di4 SERVO MOTOR
Ax : Analog pin x
19/SCL/A5
A6 A7 12 13
POP-168
A9.2.4 เป ดสวิ ตช จ ายไฟแก POP-BOT แล วกดสวิ ตช Di2 และ Di4 บนแผงวงจรควบคุ มหลั กของ POP-BOT สั งเกต
การทํ างานของเซอร โวมอเตอร
สวิ ตช Di2 ใช ในการควบคุ มให แกนหมุ นของเซอร โวมอเตอร เคลื่ อนที่ มายั งตํ าแหน งทางขวาสุ ด
สวิ ตช Di4 ใช ในการควบคุ มให แกนหมุ นของเซอร โวมอเตอร เคลื่ อนที่ มายั งตํ าแหน งทางซ ายสุ ด
เมื่ อเซอร โวมอเตอร ถู กควบคุ มให แกนหมุ นเคลื่ อนที่ ไปยั งตํ าแหน งทั งซ ายและขวาสุ ด ส วนควบคุ มจะขั บ
สั ญญาณเสี ยงแจ งเตื อน
ดั งนั้ นด วยการใช สวิ ตช ทั้ งสองตั วจึ งสามารถควบคุ ม และกํ าหนดตํ าแหน งในการเคลื่ อนที่ ของแกนหมุ น
ของเซอร โวมอเตอร ได โดยที่ SLCD แสดงค าตํ าแหน งของแกนหมุ นให ทราบอย างต อเนื่ องด วย