
Page 25 - Schmalz - Vacuum Components
P. 25
2_Kap_VT_EN_2016_VT_KAT 18.02.16 09:34 Seite 25
PA01019111_inh_EN.pdf
Vacuum Knowledge
The Vacuum System and its Components
PA01019111_inh_EN.pdf PA01019111_inh_EN.pdf
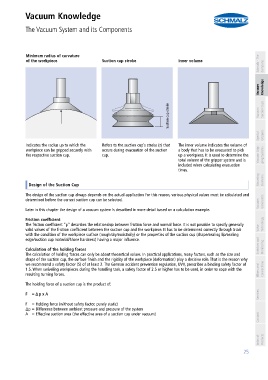
Minimum radius of curvature
Schmalz - The Company
Suction cup stroke
Inner volume
of the workpiece
Vacuum Knowledge
Suction cup stroke Vacuum Suction Cups
Special Grippers
Indicates the radius up to which the Refers to the suction cup’s stroke (z) that The inner volume indicates the volume of
workpiece can be gripped securely with occurs during evacuation of the suction a body that has to be evacuated to pick
the respective suction cup. cup. up a workpiece. It is used to determine the Vacuum Grip- ping Systems
total volume of the gripper system and is
included when calculating evacuation
times.
Mounting Elements
Design of the Suction Cup
The design of the suction cup always depends on the actual application For this reason, various physical values must be calculated and
Vacuum Generators
determined before the correct suction cup can be selected.
Later in this chapter the design of a vacuum system is described in more detail based on a calculation example.
Friction coefficient
The friction coefficient “µ” describes the relationship between friction force and normal force. It is not possible to specify generally Technology
valid values of the friction coefficient between the suction cup and the workpiece. It has to be determined correctly through trials Valve
with the condition of the workpiece surface (rough/dry/moist/oily) or the properties of the suction cup (shape/sealing lip/sealing
edge/suction cup material/Shore hardness) having a major influence.
Calculation of the holding forces Switches and Monitoring
The calculation of holding forces can only be about theoretical values. In practical applications, many factors, such as the size and
shape of the suction cup, the surface finish and the rigidity of the workpiece (deformation) play a decisive role. That is the reason why
we recommend a safety factor (S) of at least 2. The German accident prevention regulation, UVV, prescribes a binding safety factor of
1.5. When swiveling workpieces during the handling task, a safety factor of 2.5 or higher has to be used, in order to cope with the Filters and Connections
resulting turning forces.
The holding force of a suction cup is the product of:
Services
F = ∆p x A
F = Holding force (without safety factor, purely static)
∆p = Difference between ambient pressure and pressure of the system
A= Effective suction area (the effective area of a suction cup under vacuum)
Contact
Index of Produktindex Produktindex Produktindex Products
25
PA01019111_inh_EN.pdf