
Page 118 - Mechatronics with Experiments
P. 118
104 MECHATRONICS
120
x
Re(s)
Re(s)
P I
(b)
(a)
as K Im(s)
Im(s) p
s + K K pI as K K d s + 1
Asymtotic location 1 + K p s 3 = 0 p 1 + K p K p = 0
of one of CLS s 2
pole. Also CLS
Zero
Re(s)
Re(s) K p
– K I K I – K
K p 2K d
p PD
PI
(d)
Im(s)
(c) Im(s)
s
1 + Kd = 0
s + K p
2
as K_d : 0 to infinity
Re(s)
PD
(e)
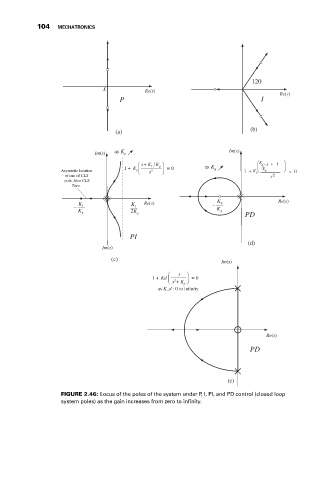
FIGURE 2.46: Locus of the poles of the system under P, I, PI, and PD control (closed loop
system poles) as the gain increases from zero to infinity.