
Page 80 - Research Innovation 2566
P. 80
การออกแบบและพัฒนาอุปกรณช่วยพยุงแขนส าหรับกายภาพบ าบัดแขนส่วนบน
์
์
ึ
การออกแบบและพัฒนาอุปกรณช่วยฝกเดินส าหรับเด็กสมองพิการ ในผู้ป่วยอัมพฤกษ์ครึ่งซีกจากโรคหลอดเลือดสมอง
The Design and Development of Gait Training Machine for Children Design and Development of a Passive Arm Orthosis for Upper Limb
with Cerebral Palsy Rehabilitation with Hemiparetic from Stroke
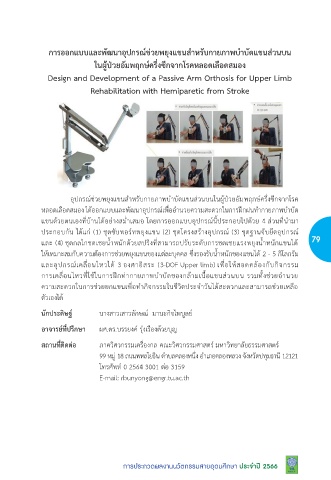
อุปกรณ์ช่วยพยุงแขนส าหรับกายภาพบ าบัดแขนส่วนบนในผู้ป่วยอัมพฤกษ์ครึ่งซกจากโรค
ี
หลอดเลือดสมอง ได้ออกแบบและพัฒนาอุปกรณ์เพื่ออ านวยความสะดวกในการฝึกฝนท ากายภาพบ าบัด
แขนด้วยตนเองที่บ้านได้อย่างสม่ าเสมอ โดยการออกแบบอุปกรณ์นี้ประกอบไปด้วย 4 ส่วนที่น ามา
ประกอบกัน ไดแก่ (1) ชุดซบพอรทพยุงแขน (2) ชุดโครงสร้างอุปกรณ์ (3) ชุดฐานจับยึดอุปกรณ์
้
ั
์
อุปกรณ์ช่วยฝึกเดินส าหรับเด็กสมองพิการ ประกอบไปด้วยเครื่องพยุงตัวผู้ป่วยขณะเดิน และ (4) ชุดกลไกชดเชยน้ าหนักด้วยสปริงที่สามารถปรับระดับการชดเชยแรงพยุงน้ าหนักแขนได้ 79
แบบไดนามิค ทดแทนการใช้ผู้ดูแลในการพยุงผู้ป่วยยืน ช่วยป้องกันผู้ป่วยล้มขณะฝึกเดิน มีระบบ ให้เหมาะสมกับความต้องการช่วยพยุงแขนของแต่ละบุคคล ซึ่งรองรับน้ าหนักของแขนได้ 2 - 5 กิโลกรัม
้
dynamic body weight support ช่วยผ่อนแรงท าให้ขาของผู้ป่วยรับน้ าหนักร่างกายตนเองน้อยลง และอุปกรณ์เคลื่อนไหวได้ 3 องศาอิสระ (3-DOF Upper limb) เพื่อให้สอดคลองกับกิจกรรม
สามารถใช้ฝึกเดินกับเครื่องฝึกเดิน elliptical ลู่วิ่ง หรือฝึกเดินบนพื้นราบได้ และสามารถปรับเป็น การเคลื่อนไหวที่ใช้ในการฝึกท่ากายภาพบ าบัดของกล้ามเนื้อแขนส่วนบน รวมทั้งช่วยอ านวย
ื
้
เครื่องขนย้ายผู้ป่วยได้ และเครื่องฝึกเดิน elliptical ท าการช่วยผู้ป่วยฝึกเดิน แบบ end effector ความสะดวกในการช่วยยกแขนเพื่อท ากิจกรรมในชีวิตประจาวันไดสะดวกและสามารถช่วยเหลอ
ซงประยุกต์จากเครื่องออกก าลังกายขาแบบวงรี elliptical โดยมีมอเตอร์ส่งแรงไปที่เท้าผู้ป่วย ท าให้ ตัวเองได้
ึ่
การฝึกเดินสามารถท าได้ต่อเนื่องมากขึ้น ลดแรงผู้ช่วยฝึก นักประดิษฐ์ นางสาวเสาวลักษณ์ มานะกิจไพบูลย์
นักประดิษฐ์ นายวริทธิธร จันทร อาจารย์ที่ปรึกษา ผศ.ดร.บรรยงค์ รุ่งเรืองด้วยบุญ
อาจารย์ที่ปรึกษา ผศ.ดร.บรรยงค์ รุ่งเรืองด้วยบุญ สถานที่ติดต่อ ภาควิศวกรรมเครื่องกล คณะวิศวกรรมศาสตร มหาวิทยาลัยธรรมศาสตร ์
์
สถานที่ติดต่อ ภาควิศวกรรมเครื่องกล คณะวิศวกรรมศาสตร มหาวิทยาลัยธรรมศาสตร ์ 99 หมู่ 18 ถนนพหลโยธิน ตาบลคลองหนึ่ง อ าเภอคลองหลวง จังหวัดปทุมธานี 12121
์
99 หมู่ 18 ถนนพหลโยธิน ตาบลคลองหนึ่ง อ าเภอคลองหลวง จังหวัดปทุมธานี 12121 โทรศัพท์ 0 2564 3001 ต่อ 3159
โทรศัพท์ 0 2564 3001 ต่อ 3159 E-mail: rbunyong@engr.tu.ac.th
E-mail: rbunyong@engr.tu.ac.th
80 ส ำนักงำนกำรวิจัยแห่งชำติ (วช.) ส ำนักงำนกำรวิจัยแห่งชำติ (วช.) 81
การประกวดผลงานนวัตกรรมสายอุุดมศึึกษา ประจำปี 2566