
Page 36 - Microsoft Word - ASEPT-UV User Manual
P. 36
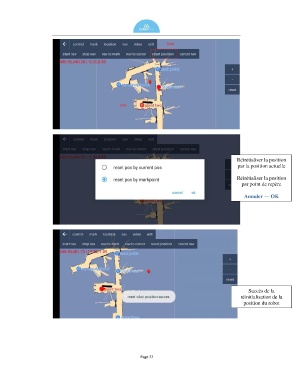
Réinitialiser la position
par la position actuelle
Réinitialiser la position
par point de repère
Annuler — OK
Succès de la
réinitialisation de la
position du robot
Page 33