
Page 200 - CKA ISA DOSSIER
P. 200
Step-One
1. Joining the base beams with countersunk screws
2. Screwing the tires with the shaft connectors and
screws.
3. Screwing the Encoder motors with the DC motor
bracket.
4. Attaching all the built parts together in the right
order.
N.B: Step 1-4 is for both sides of the robot.
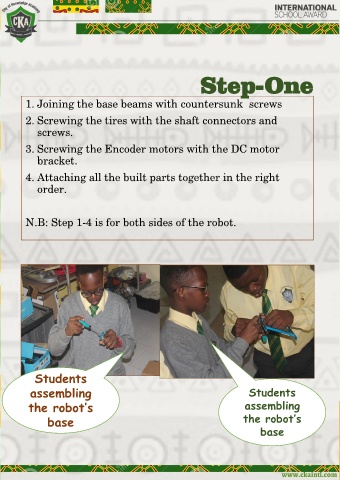
Students
assembling Students
the robot’s assembling
base the robot’s
base