
Page 298 - Untitled
P. 298
༛
282༛༛༛บททีไ༛9༛ชิฟรีจิสตอร༛ ຏ ༛ วงจรดิจิตอลละลอจิก༛
ຏ
ิ
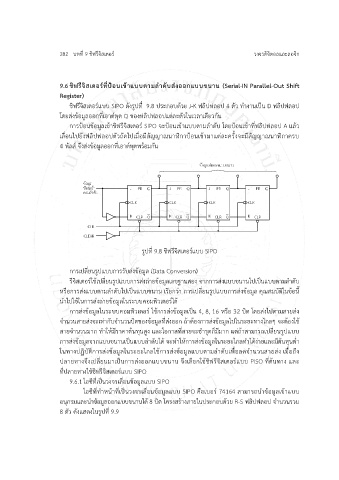
9.6༛ชิฟรีจสตอรทีไปງอนขຌาบบตามล้าดับสงออกบบขนาน༛(Serial-IN༛Parallel-Out༛Shift༛
Register)༛
༛ ชิฟรีจิสตอรຏบบ༛SIPO༛ดังรูปทีไ༛༛9.8༛ประกอบดຌวย༛J-K༛ฟลิปฟลอป༛4༛ตว༛ท้างานปຓน༛D༛ฟลิปฟลอป
ั
ดยสงขຌอมูลออกทีไอาตຏพุต༛Q༛ของฟลิปฟลอปตละตัว฿นวลาดียวกัน༛
༛ การปງอนขຌอมลขຌาชิฟรีจิสตอรຏ༛SIPO༛จะปງอนขຌาบบตามล้าดับ༛ดยปງอนขຌาทีไฟลิปฟลอป༛A༛ลຌว
ู
ืไ
ั
ี
ลืไอนเปยงฟลิปฟลอปตัวถัดเปมอมีสัญญาณนาฬิกาปງอนขຌามาตละครัๅงจะมสัญญาณนาฬิกาครบ༛༛
4༛พัลสຏ༛จึงสงขຌอมูลออกทีไอาตຏพุตพรຌอมกัน༛
༛
Q Q Q
༛
รูปทีไ༛9.8༛ชิฟรีจิสตอรຏบบ༛SIPO༛
༛
༛ การปลีไยนรูปบบการรับสงขຌอมูล༛(Data༛Conversion)༛
༛ รีจิสตอรຏ฿ชຌปลีไยนรูปบบการสงถายขຌอมูลลขฐานสอง༛จากการสงบบขนานเปปຓนบบตามล้าดับ༛
ู
หรือการสงบบตามล้าดับเปปຓนบบขนาน༛รียกวา༛การปลีไยนรูปบบการสงขຌอมล༛คุณสมบัติ฿นขຌอน ีๅ
น้าเป฿ชຌ฿นการสงถายขຌอมูล฿นระบบคอมพิวตอรຏเด༛ ຌ
ู
༛ การสงขຌอมล฿นระบบคอมพิวตอรຏ༛฿ชຌการสงขຌอมลปຓน༛4,༛8,༛16༛หรือ༛32༛บิต༛ดยสงเปตามสายสง༛
ู
จ้านวนสายสงจะทากับจ้านวนบิตของขຌอมูลทีไสงออก༛ถຌาตຌองการสงขຌอมูลเป฿นระยะทางเกลโ༛จะตຌอง฿ชຌ
ใ
ี
สายจ้านวนมาก༛ท้า฿หຌมราคาตຌนทุนสูง༛ละอกาสทีไสายจะช้ารุดกมีมาก༛ตถຌาสามารถปลีไยนรูปบบ༛
ั
การสงขຌอมลจากบบขนานปຓนบบล้าดบเดຌ༛จะท้า฿หຌการสงขຌอมูล฿นระยะเกลท้าเดຌงายละมีตຌนทุนตไ้า༛
ู
ืไ
ั
ู
ืไ
ู
฿นทางปฏิบัติการสงขຌอมล฿นระยะเกล฿ชຌการสงขຌอมลบบตามล้าดบพอลดจ้านวนสายสง༛มอถึง
ปลายทางจึงปลีไยนมาปຓนการสงออกบบขนาน༛จึงลือก฿ชຌชิฟรีจิสตอรຏบบ༛PISO༛ทีไตนทาง༛ละ༛
ຌ
ทีไปลายทาง฿ชຌชิฟรีจิสตอรຏบบ༛SIPO༛ ༛ ༛
༛ 9.6.1༛เอซีทีไปຓนวงจรลืไอนขຌอมูลบบ༛SIPO༛ ༛ ༛ ༛
ู
༛ ༛ ༛ เอซีทีไท้าหนຌาทีไปຓนวงจรลืไอนขຌอมลบบ༛SIPO༛คือบอรຏ༛74164༛สามารถน้าขຌอมูลขຌาบบ
อนุกรมละน้าขຌอมูลออกบบขนานเดຌ༛8༛บิต༛ครงสรຌางภาย฿นประกอบดຌวย༛R-S༛ฟลิปฟลอป༛จ้านวนรวม༛
8༛ตัว༛ดังสดง฿นรูปทีไ༛9.9༛