
Page 72 - Programmable Logic Controllers, Fifth Edition
P. 72
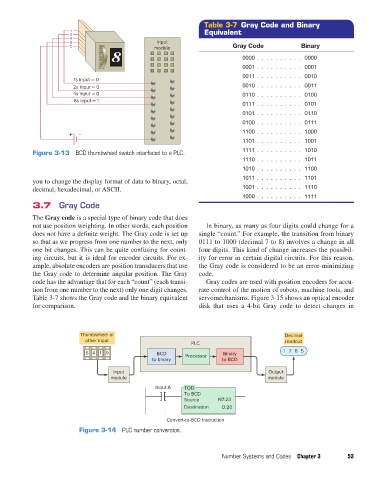
Table 3-7 Gray Code and Binary
1 Equivalent
2
4
8 Input
C module Gray Code Binary
0000 0000
0001 0001
0011 0010
1s Input = 0
2s Input = 0 0010 0011
4s Input = 0 0110 0100
8s Input = 1
0111 0101
0101 0110
0100 0111
1100 1000
+ –
1101 1001
Figure 3-13 BCD thumbwheel switch interfaced to a PLC. 1111 1010
1110 1011
1010 1100
1011 1101
you to change the display format of data to binary, octal,
decimal, hexadecimal, or ASCII. 1001 1110
1000 1111
3.7 Gray Code
The Gray code is a special type of binary code that does
not use position weighting. In other words, each position In binary, as many as four digits could change for a
does not have a definite weight. The Gray code is set up single “count.” For example, the transition from binary
so that as we progress from one number to the next, only 0111 to 1000 (decimal 7 to 8) involves a change in all
one bit changes. This can be quite confusing for count- four digits. This kind of change increases the possibil-
ing circuits, but it is ideal for encoder circuits. For ex- ity for error in certain digital circuits. For this reason,
ample, absolute encoders are position transducers that use the Gray code is considered to be an error-minimizing
the Gray code to determine angular position. The Gray code.
code has the advantage that for each “count” (each transi- Gray codes are used with position encoders for accu-
tion from one number to the next) only one digit changes. rate control of the motion of robots, machine tools, and
Table 3-7 shows the Gray code and the binary equivalent servomechanisms. Figure 3-15 shows an optical encoder
for comparison. disk that uses a 4-bit Gray code to detect changes in
Thumbwheel or Decimal
other input readout
PLC
6 41 9 BCD Processor Binary 17 65
to binary to BCD
Input Output
module module
Input A TOD
To BCD
Source N7:23
Destination O:20
Convert-to-BCD instruction
Figure 3-14 PLC number conversion.
Number Systems and Codes Chapter 3 53
pet73842_ch03_046-060.indd 53 03/11/15 3:50 PM