
Page 27 - DEBERES Y CONSULTAS
P. 27
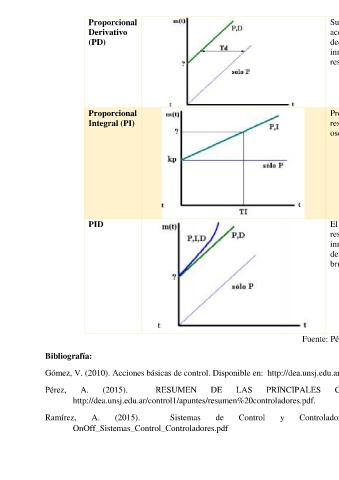
Proporcional Su tiempo es La velocidad de Mejora la Amplifica las señales de
Derivativo acelerado es reacción será muy estabilidad del ruido, haciendo que e(t)
(PD) decir es elevada sistema no sea una función
inmediata su suave y por tanto
respuesta haciendo que m(t)
fluctúe
considerablemente,
saturando al actuador.
Proporcional Presenta una Presenta una leve En el control Filtra los ruidos de alta
Integral (PI) respuesta lenta y velocidad lenta integral, la frecuencia.
oscilatoria hasta eliminar el respuesta m(t) es
error proporcional a la
integral de e(t), por
consiguiente la
señal m(t) no se
estabilizará
mientras la integral
de e(t) no sea nula
PID El tiempo de La velocidad de Logra una buena Presenta respuesta al
respuesta será reacción será muy estabilidad relativa menor ruido de medida
inmediata pero elevada del sistema de
de una manera control
brusca
Fuente: Pérez, (2015)
Bibliografía:
Gómez, V. (2010). Acciones básicas de control. Disponible en: http://dea.unsj.edu.ar/control1/apuntes/accionesdecontrol.pdf
Pérez, A. (2015). RESUMEN DE LAS PRINCIPALES CARACTERÍSTICAS DE CONTROLADORES PID. Disponible en:
http://dea.unsj.edu.ar/control1/apuntes/resumen%20controladores.pdf.
Ramírez, A. (2015). Sistemas de Control y Controladores. Disponible en: https://zulaco64.updog.co/Material_Didactico/Control-
OnOff_Sistemas_Control_Controladores.pdf