
Page 180 - sadasd
P. 180
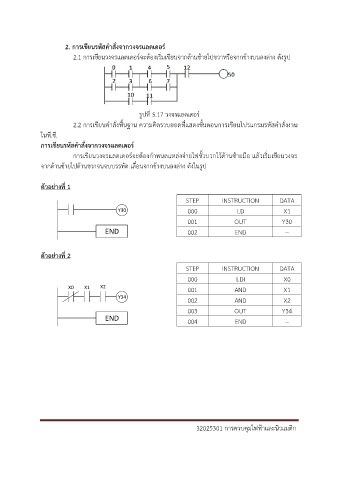
2. กำรเขียนรหัสค ำสั่งจำกวงจรแลดเดอร์
2.1 การเขียนวงจรแลดเดอร์จะต้องเริ่มเขียนจากด้านซ้ายไปขวาหรือจากข้างบนลงล่าง ดังรูป
รูปที่ 5.17 วงจรแลดเดอร์
ิ
2.2 การเขียนคาสั่งพื้นฐาน ความคดรวบยอดที่แสดงขั้นตอนการเขียนโปรแกรมรหัสคาสั่งงาน
ในพี.ซี.
กำรเขียนรหัสค ำสั่งจำกวงจรแลดเดอร์
้
ั้
ี
ี
การเขยนวงจรแลดเดอร์จะต้องก าหนดแหล่งจ่ายไฟขวบวกไวด้านซ้ายมือ แล้วเริ่มเขยนวงจร
จากด้านซ้ายไปด้านขวาจนจบบรรทัด เลื่อนจากข้างบนลงล่าง ดังในรูป
ตัวอย่ำงที่ 1
STEP INSTRUCTION DATA
Y30 000 LD X1
001 OUT Y30
END 002 END --
ตัวอย่ำงที่ 2
STEP INSTRUCTION DATA
000 LDI X0
X0 X1 X2 001 AND X1
Y34 002 AND X2
003 OUT Y34
END 004 END --
32025301 การควบคุมไฟฟ้าและนิวแมติก