
Page 130 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 130
118 CHAPTER 5 Vehicle Design and Stability
Righting moment
Righting moment
PP CB
P
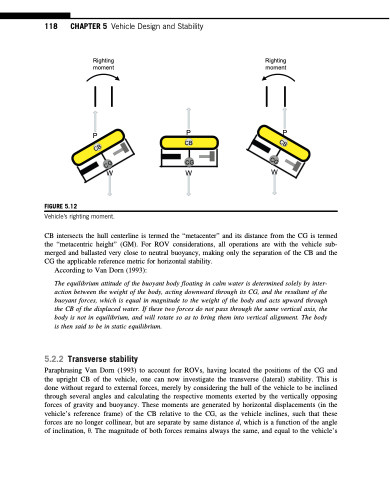
FIGURE 5.12
CG
WW
W
Vehicle’s righting moment.
CB intersects the hull centerline is termed the “metacenter” and its distance from the CG is termed the “metacentric height” (GM). For ROV considerations, all operations are with the vehicle sub- merged and ballasted very close to neutral buoyancy, making only the separation of the CB and the CG the applicable reference metric for horizontal stability.
According to Van Dorn (1993):
The equilibrium attitude of the buoyant body floating in calm water is determined solely by inter- action between the weight of the body, acting downward through its CG, and the resultant of the buoyant forces, which is equal in magnitude to the weight of the body and acts upward through the CB of the displaced water. If these two forces do not pass through the same vertical axis, the body is not in equilibrium, and will rotate so as to bring them into vertical alignment. The body is then said to be in static equilibrium.
5.2.2 Transverse stability
Paraphrasing Van Dorn (1993) to account for ROVs, having located the positions of the CG and the upright CB of the vehicle, one can now investigate the transverse (lateral) stability. This is done without regard to external forces, merely by considering the hull of the vehicle to be inclined through several angles and calculating the respective moments exerted by the vertically opposing forces of gravity and buoyancy. These moments are generated by horizontal displacements (in the vehicle’s reference frame) of the CB relative to the CG, as the vehicle inclines, such that these forces are no longer collinear, but are separate by same distance d, which is a function of the angle of inclination, θ. The magnitude of both forces remains always the same, and equal to the vehicle’s
CB CG
CB CG
