
Page 140 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 140
128
CHAPTER 6 Thrusters
(a)
(b)
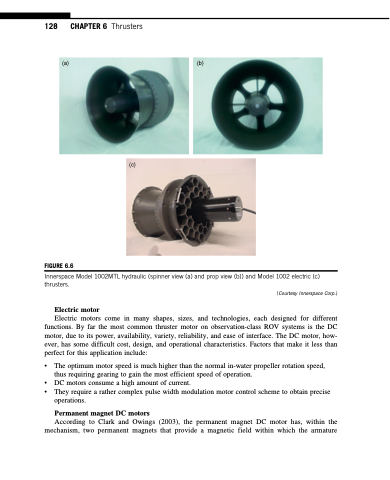
FIGURE 6.6
(c)
Innerspace Model 1002MTL hydraulic (spinner view (a) and prop view (b)) and Model 1002 electric (c) thrusters.
(Courtesy Innerspace Corp.)
Electric motor
Electric motors come in many shapes, sizes, and technologies, each designed for different functions. By far the most common thruster motor on observation-class ROV systems is the DC motor, due to its power, availability, variety, reliability, and ease of interface. The DC motor, how- ever, has some difficult cost, design, and operational characteristics. Factors that make it less than perfect for this application include:
• The optimum motor speed is much higher than the normal in-water propeller rotation speed, thus requiring gearing to gain the most efficient speed of operation.
• DC motors consume a high amount of current.
• They require a rather complex pulse width modulation motor control scheme to obtain precise
operations.
Permanent magnet DC motors
According to Clark and Owings (2003), the permanent magnet DC motor has, within the mechanism, two permanent magnets that provide a magnetic field within which the armature
