
Page 238 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 238
Fmechanical
Force
9.2 TMS-based vehicle deployment techniques 227
9.2.1 Winches
Winches fit into the classification of “simple machines,” performing work by transferring one phys- ical force into another. Winches, which have been around for a very long time, were first used to hoist water buckets from water wells.
Winches range from the simple reeling device with use of a hand crank for orderly handling of OCROV tether to the complex heave-compensated winch systems for handling the heavy loads imposed by WCROV systems.
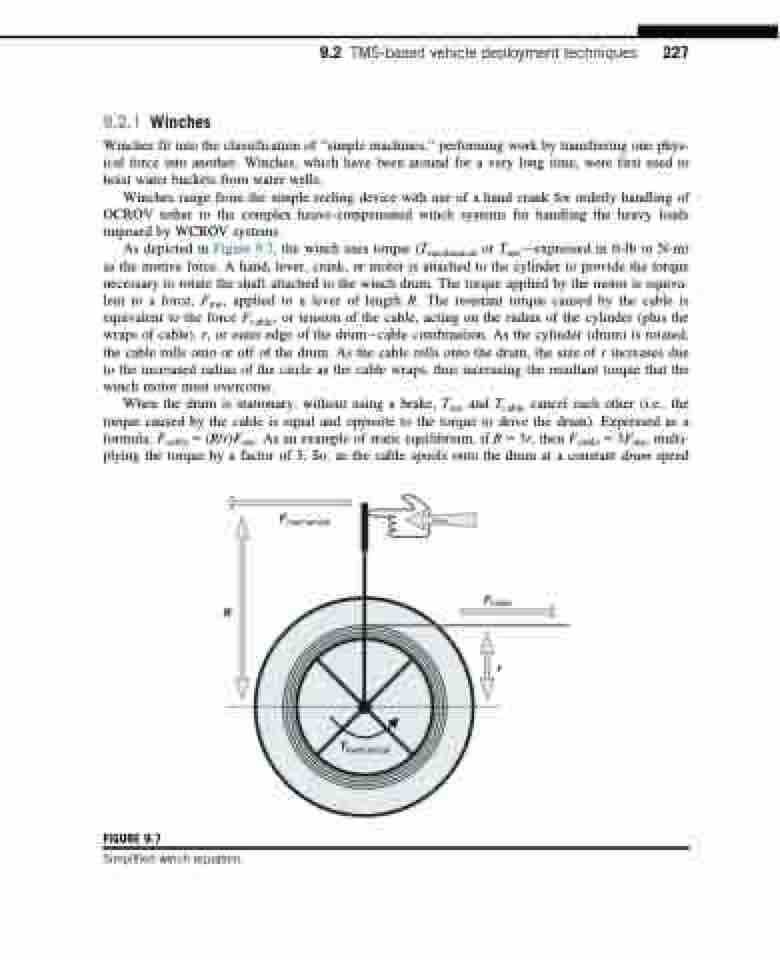
As depicted in Figure 9.7, the winch uses torque (Tmechanical or Tme—expressed in ft-lb or N-m) as the motive force. A hand, lever, crank, or motor is attached to the cylinder to provide the torque necessary to rotate the shaft attached to the winch drum. The torque applied by the motor is equiva- lent to a force, Fme, applied to a lever of length R. The resistant torque caused by the cable is equivalent to the force Fcable, or tension of the cable, acting on the radius of the cylinder (plus the wraps of cable), r, or outer edge of the drumcable combination. As the cylinder (drum) is rotated, the cable rolls onto or off of the drum. As the cable rolls onto the drum, the size of r increases due to the increased radius of the circle as the cable wraps, thus increasing the resultant torque that the winch motor must overcome.
When the drum is stationary, without using a brake, Tme and Tcable cancel each other (i.e., the torque caused by the cable is equal and opposite to the torque to drive the drum). Expressed as a formula, Fcable 5 (R/r)Fme. As an example of static equilibrium, if R 5 3r, then Fcable 5 3Fme, multi- plying the torque by a factor of 3. So, as the cable spools onto the drum at a constant drum speed
R
Fcable
r
FIGURE 9.7
Tmechanical
Simplified winch equation.
