
Page 489 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 489
484 CHAPTER 18 Ancillary Sensors
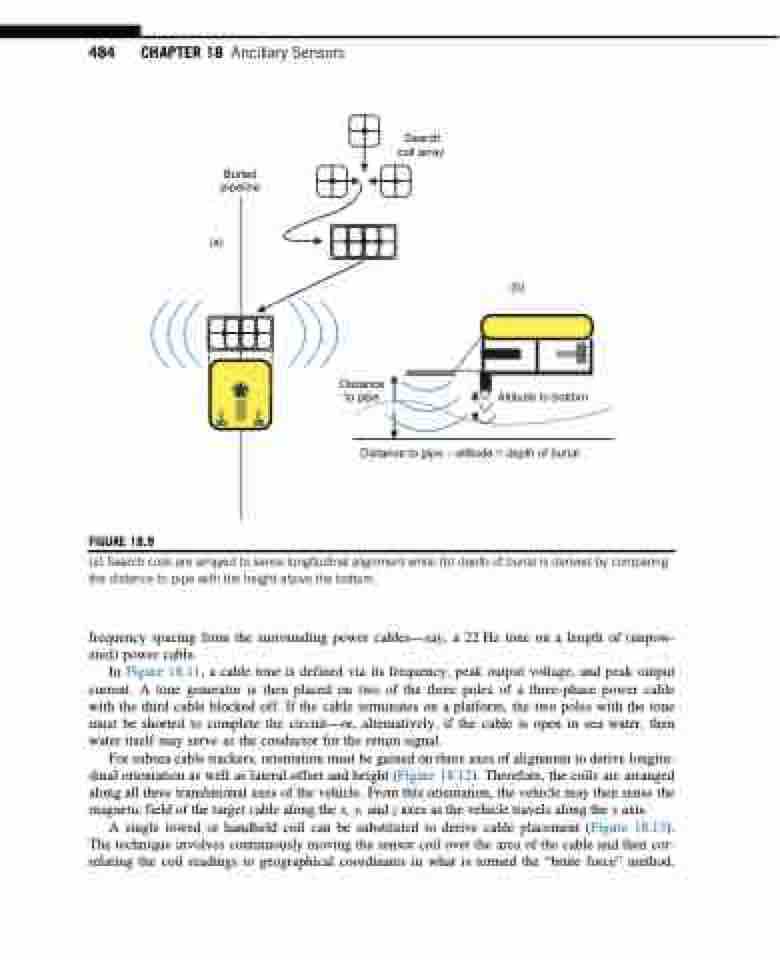
Buried pipeline
(a)
Search coil array
Distance to pipe
``
(b)
Altitude to bottom
FIGURE 18.8
Distance to pipe – altitude = depth of burial
(a) Search coils are arrayed to sense longitudinal alignment while (b) depth of burial is derived by comparing the distance to pipe with the height above the bottom.
frequency spacing from the surrounding power cables—say, a 22 Hz tone on a length of (unpow- ered) power cable.
In Figure 18.11, a cable tone is defined via its frequency, peak output voltage, and peak output current. A tone generator is then placed on two of the three poles of a three-phase power cable with the third cable blocked off. If the cable terminates on a platform, the two poles with the tone must be shorted to complete the circuit—or, alternatively, if the cable is open in sea water, then water itself may serve as the conductor for the return signal.
For subsea cable trackers, orientation must be gained on three axes of alignment to derive longitu- dinal orientation as well as lateral offset and height (Figure 18.12). Therefore, the coils are arranged along all three translational axes of the vehicle. From this orientation, the vehicle may then sense the magnetic field of the target cable along the x, y, and z axes as the vehicle travels along the y axis.
A single towed or handheld coil can be substituted to derive cable placement (Figure 18.13). The technique involves continuously moving the sensor coil over the area of the cable and then cor- relating the coil readings to geographical coordinates in what is termed the “brute force” method.
