
Page 491 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 491
486 CHAPTER 18 Ancillary Sensors
(a)
(b)
22.0 Hz
Frequency
–0+
Peak output voltage
–0+
Peak output current
Return via seawater
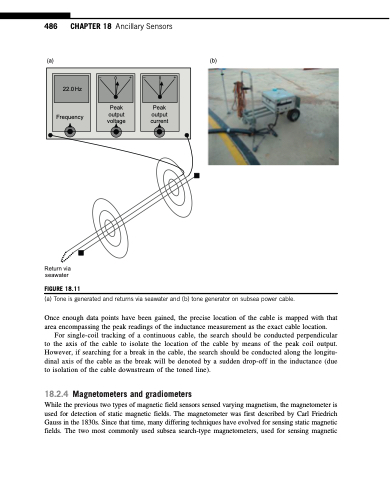
FIGURE 18.11
(a) Tone is generated and returns via seawater and (b) tone generator on subsea power cable.
Once enough data points have been gained, the precise location of the cable is mapped with that area encompassing the peak readings of the inductance measurement as the exact cable location.
For single-coil tracking of a continuous cable, the search should be conducted perpendicular to the axis of the cable to isolate the location of the cable by means of the peak coil output. However, if searching for a break in the cable, the search should be conducted along the longitu- dinal axis of the cable as the break will be denoted by a sudden drop-off in the inductance (due to isolation of the cable downstream of the toned line).
18.2.4 Magnetometers and gradiometers
While the previous two types of magnetic field sensors sensed varying magnetism, the magnetometer is used for detection of static magnetic fields. The magnetometer was first described by Carl Friedrich Gauss in the 1830s. Since that time, many differing techniques have evolved for sensing static magnetic fields. The two most commonly used subsea search-type magnetometers, used for sensing magnetic
