
Page 513 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 513
510 CHAPTER 19 Manipulators
Rotation
Rotation
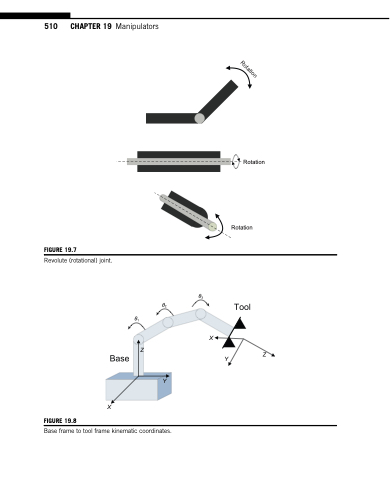
FIGURE 19.7
Revolute (rotational) joint.
θ2 θ1
Y
θ3
X
Y
Z
Z
X
FIGURE 19.8
Base frame to tool frame kinematic coordinates.
Rotation
