
Page 519 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 519
516 CHAPTER 19 Manipulators
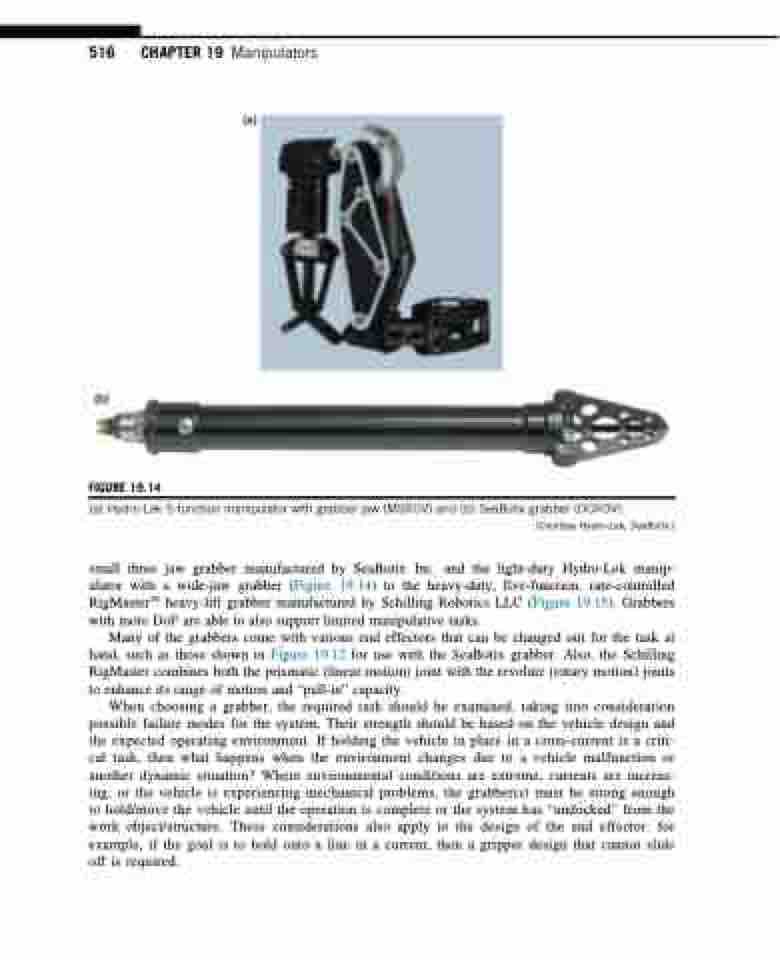
FIGURE 19.14
(a) Hydro-Lek 5-function manipulator with grabber jaw (MSROV) and (b) SeaBotix grabber (OCROV).
(Courtesy Hydro-Lek, SeaBotix.)
small three jaw grabber manufactured by SeaBotix Inc. and the light-duty Hydro-Lek manip- ulator with a wide-jaw grabber (Figure 19.14) to the heavy-duty, five-function, rate-controlled RigMastert heavy-lift grabber manufactured by Schilling Robotics LLC (Figure 19.15). Grabbers with more DoF are able to also support limited manipulative tasks.
Many of the grabbers come with various end effectors that can be changed out for the task at hand, such as those shown in Figure 19.12 for use with the SeaBotix grabber. Also, the Schilling RigMaster combines both the prismatic (linear motion) joint with the revolute (rotary motion) joints to enhance its range of motion and “pull-in” capacity.
When choosing a grabber, the required task should be examined, taking into consideration possible failure modes for the system. Their strength should be based on the vehicle design and the expected operating environment. If holding the vehicle in place in a cross-current is a criti- cal task, then what happens when the environment changes due to a vehicle malfunction or another dynamic situation? Where environmental conditions are extreme, currents are increas- ing, or the vehicle is experiencing mechanical problems, the grabber(s) must be strong enough to hold/move the vehicle until the operation is complete or the system has “undocked” from the work object/structure. These considerations also apply to the design of the end effector: for example, if the goal is to hold onto a line in a current, then a gripper design that cannot slide off is required.
