
Page 595 - The ROV Manual - A User Guide for Remotely Operated Vehicles 2nd edition
P. 595
594 CHAPTER 21 Practical Applications
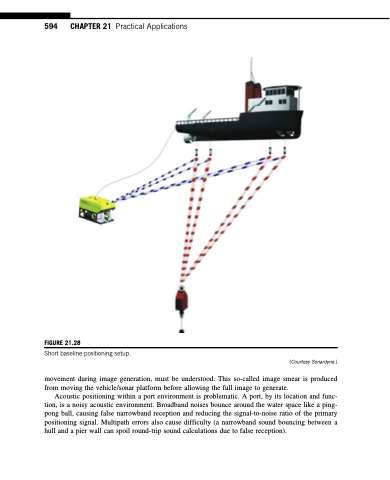
FIGURE 21.28
Short baseline positioning setup.
movement during image generation, must be understood. This so-called image smear is produced from moving the vehicle/sonar platform before allowing the full image to generate.
Acoustic positioning within a port environment is problematic. A port, by its location and func- tion, is a noisy acoustic environment. Broadband noises bounce around the water space like a ping- pong ball, causing false narrowband reception and reducing the signal-to-noise ratio of the primary positioning signal. Multipath errors also cause difficulty (a narrowband sound bouncing between a hull and a pier wall can spoil round-trip sound calculations due to false reception).
(Courtesy Sonardyne.)
